 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeJoint-repositionable Inner-wireless Planar Snake Robot
Nov 21, 2024
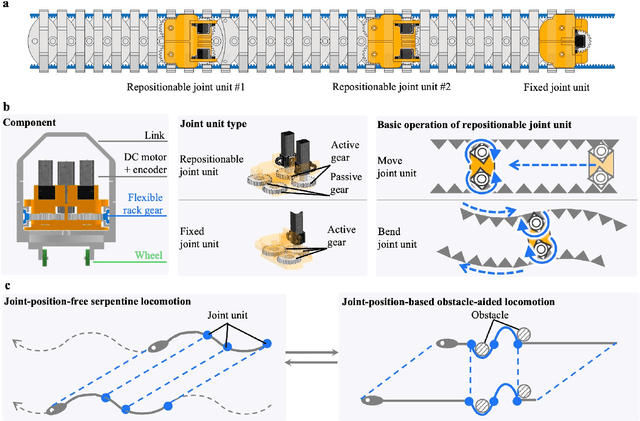
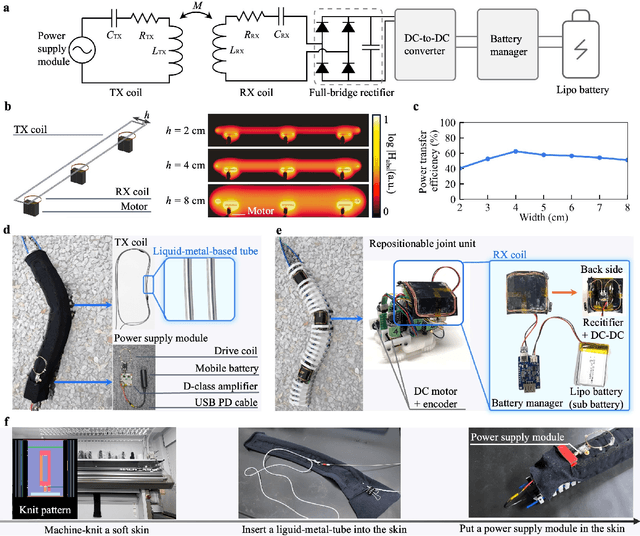
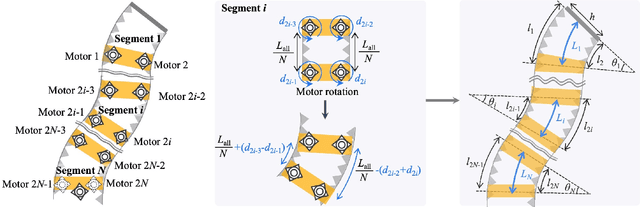
Bio-inspired multi-joint snake robots offer the advantages of terrain adaptability due to their limbless structure and high flexibility. However, a series of dozens of motor units in typical multiple-joint snake robots results in a heavy body structure and hundreds of watts of high power consumption. This paper presents a joint-repositionable, inner-wireless snake robot that enables multi-joint-like locomotion using a low-powered underactuated mechanism. The snake robot, consisting of a series of flexible passive links, can dynamically change its joint coupling configuration by repositioning motor-driven joint units along rack gears inside the robot. Additionally, a soft robot skin wirelessly powers the internal joint units, avoiding the risk of wire tangling and disconnection caused by the movable joint units. The combination of the joint-repositionable mechanism and the wireless-charging-enabled soft skin achieves a high degree of bending, along with a lightweight structure of 1.3 kg and energy-efficient wireless power transmission of 7.6 watts.