 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDrift Reduction for Monocular Visual Odometry of Intelligent Vehicles using Feedforward Neural Networks
Jul 02, 2022
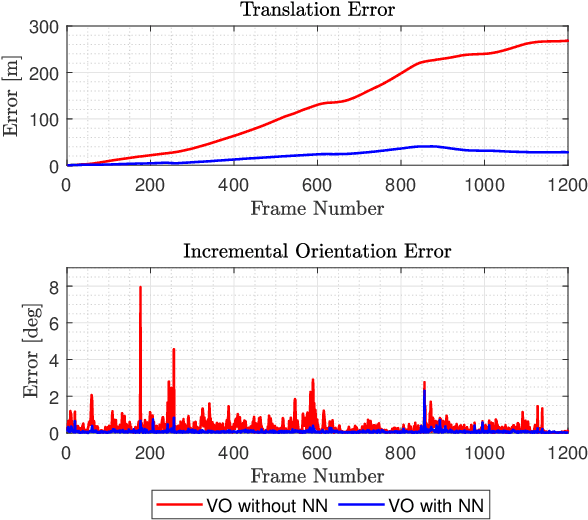
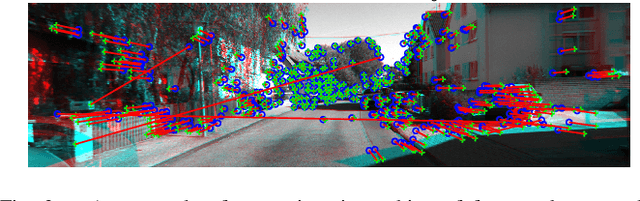
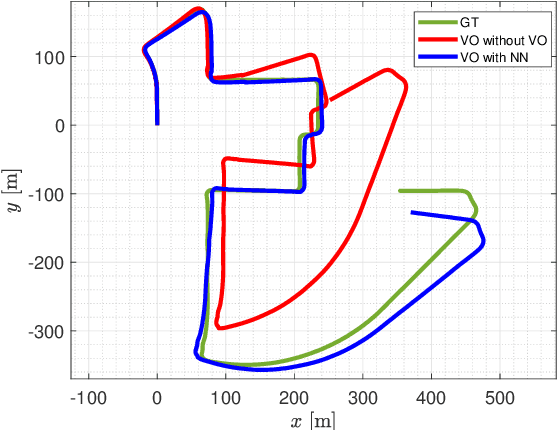
In this paper, an approach for reducing the drift in monocular visual odometry algorithms is proposed based on a feedforward neural network. A visual odometry algorithm computes the incremental motion of the vehicle between the successive camera frames, then integrates these increments to determine the pose of the vehicle. The proposed neural network reduces the errors in the pose estimation of the vehicle which results from the inaccuracies in features detection and matching, camera intrinsic parameters, and so on. These inaccuracies are propagated to the motion estimation of the vehicle causing larger amounts of estimation errors. The drift reducing neural network identifies such errors based on the motion of features in the successive camera frames leading to more accurate incremental motion estimates. The proposed drift reducing neural network is trained and validated using the KITTI dataset and the results show the efficacy of the proposed approach in reducing the errors in the incremental orientation estimation, thus reducing the overall error in the pose estimation.
Indoor SLAM Using a Foot-mounted IMU and the local Magnetic Field
Mar 29, 2022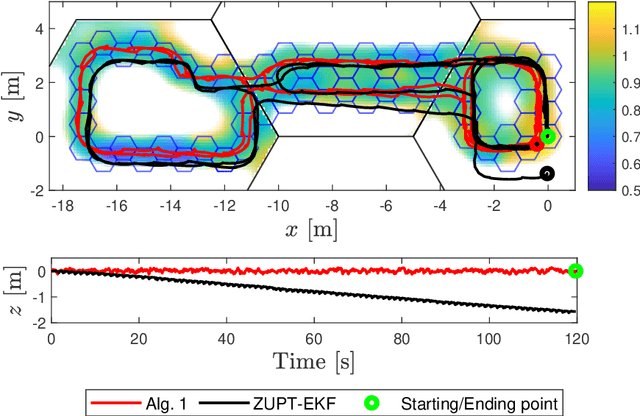
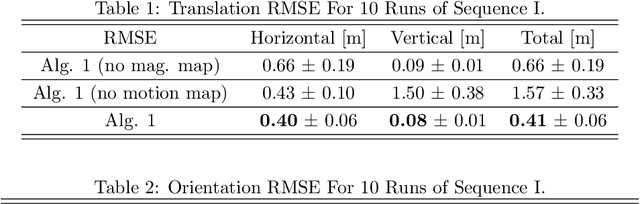

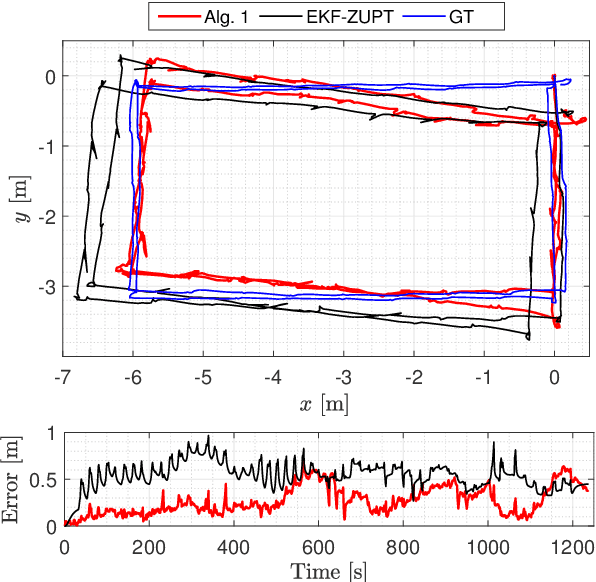
In this paper, a simultaneous localization and mapping (SLAM) algorithm for tracking the motion of a pedestrian with a foot-mounted inertial measurement unit (IMU) is proposed. The algorithm uses two maps, namely, a motion map and a magnetic field map. The motion map captures typical motion patterns of pedestrians in buildings that are constrained by e.g. corridors and doors. The magnetic map models local magnetic field anomalies in the environment using a Gaussian process (GP) model and uses them as position information. These maps are used in a Rao-Blackwellized particle filter (RBPF) to correct the pedestrian position and orientation estimates from the pedestrian dead-reckoning (PDR). The PDR is computed using an extended Kalman filter with zero-velocity updates (ZUPT-EKF). The algorithm is validated using real experimental sequences and the results show the efficacy of the algorithm in localizing pedestrians in indoor environments.
End-Effector Stabilization of a 10-DOF Mobile Manipulator using Nonlinear Model Predictive Control
Mar 24, 2021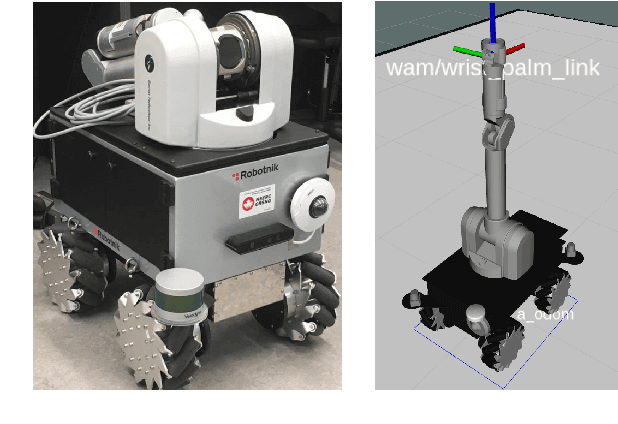
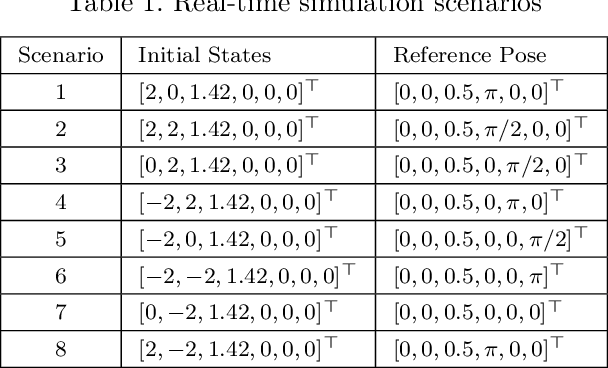
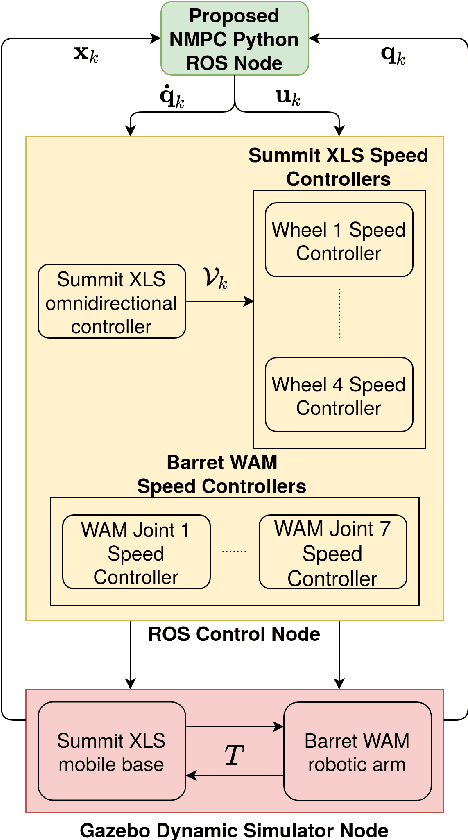
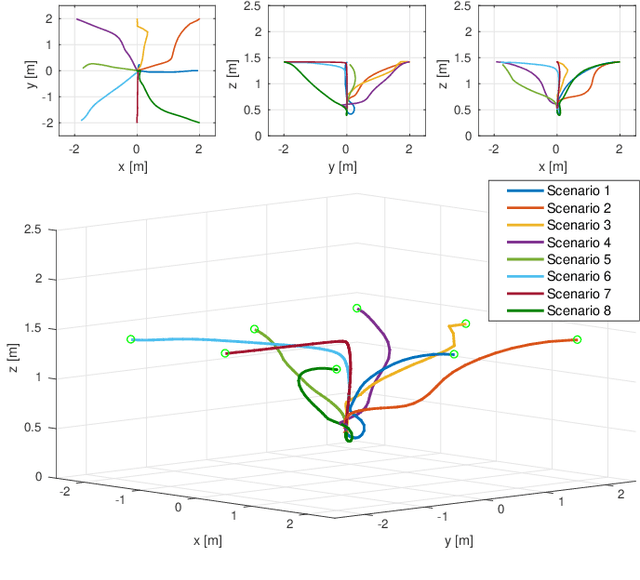
Motion control of mobile manipulators (a robotic arm mounted on a mobile base) can be challenging for complex tasks such as material and package handling. In this paper, a task-space stabilization controller based on Nonlinear Model Predictive Control (NMPC) is designed and implemented to a 10 Degrees of Freedom (DOF) mobile manipulator which consists of a 7-DOF robotic arm and a 3-DOF mobile base. The system model is based on kinematic models where the end-effector orientation is parameterized directly by a rotation matrix. The state and control constraints as well as singularity constraints are explicitly included in the NMPC formulation. The controller is tested using real-time simulations, which demonstrate high positioning accuracy with tractable computational cost.