 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeUnsupervised Skill Discovery as Exploration for Learning Agile Locomotion
Aug 12, 2025Exploration is crucial for enabling legged robots to learn agile locomotion behaviors that can overcome diverse obstacles. However, such exploration is inherently challenging, and we often rely on extensive reward engineering, expert demonstrations, or curriculum learning - all of which limit generalizability. In this work, we propose Skill Discovery as Exploration (SDAX), a novel learning framework that significantly reduces human engineering effort. SDAX leverages unsupervised skill discovery to autonomously acquire a diverse repertoire of skills for overcoming obstacles. To dynamically regulate the level of exploration during training, SDAX employs a bi-level optimization process that autonomously adjusts the degree of exploration. We demonstrate that SDAX enables quadrupedal robots to acquire highly agile behaviors including crawling, climbing, leaping, and executing complex maneuvers such as jumping off vertical walls. Finally, we deploy the learned policy on real hardware, validating its successful transfer to the real world.
PrivilegedDreamer: Explicit Imagination of Privileged Information for Rapid Adaptation of Learned Policies
Feb 17, 2025Numerous real-world control problems involve dynamics and objectives affected by unobservable hidden parameters, ranging from autonomous driving to robotic manipulation, which cause performance degradation during sim-to-real transfer. To represent these kinds of domains, we adopt hidden-parameter Markov decision processes (HIP-MDPs), which model sequential decision problems where hidden variables parameterize transition and reward functions. Existing approaches, such as domain randomization, domain adaptation, and meta-learning, simply treat the effect of hidden parameters as additional variance and often struggle to effectively handle HIP-MDP problems, especially when the rewards are parameterized by hidden variables. We introduce Privileged-Dreamer, a model-based reinforcement learning framework that extends the existing model-based approach by incorporating an explicit parameter estimation module. PrivilegedDreamer features its novel dual recurrent architecture that explicitly estimates hidden parameters from limited historical data and enables us to condition the model, actor, and critic networks on these estimated parameters. Our empirical analysis on five diverse HIP-MDP tasks demonstrates that PrivilegedDreamer outperforms state-of-the-art model-based, model-free, and domain adaptation learning algorithms. Additionally, we conduct ablation studies to justify the inclusion of each component in the proposed architecture.
Understanding Expectations for a Robotic Guide Dog for Visually Impaired People
Jan 08, 2025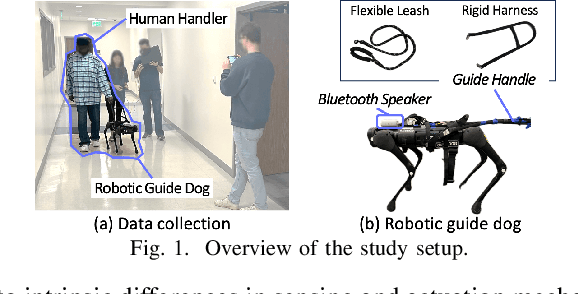

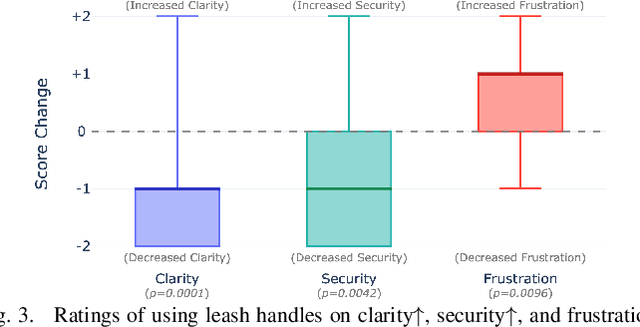
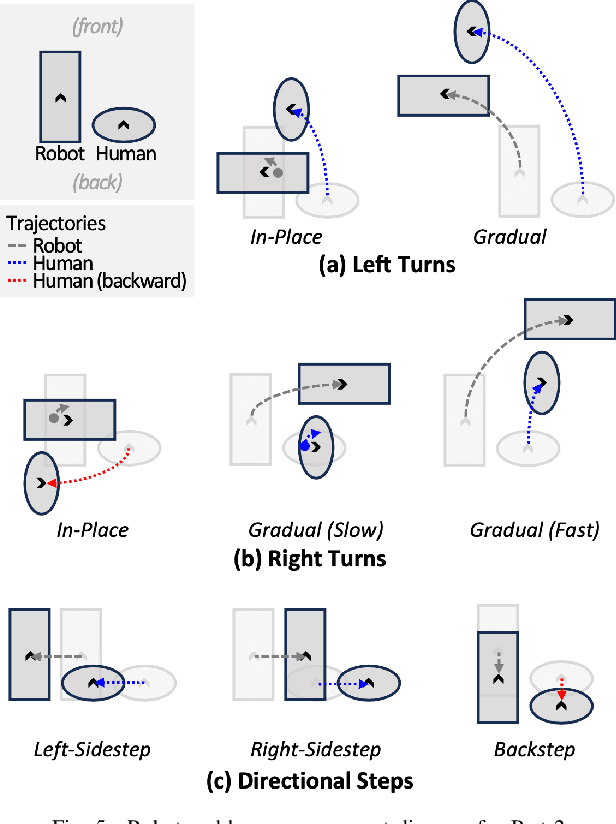
Robotic guide dogs hold significant potential to enhance the autonomy and mobility of blind or visually impaired (BVI) individuals by offering universal assistance over unstructured terrains at affordable costs. However, the design of robotic guide dogs remains underexplored, particularly in systematic aspects such as gait controllers, navigation behaviors, interaction methods, and verbal explanations. Our study addresses this gap by conducting user studies with 18 BVI participants, comprising 15 cane users and three guide dog users. Participants interacted with a quadrupedal robot and provided both quantitative and qualitative feedback. Our study revealed several design implications, such as a preference for a learning-based controller and a rigid handle, gradual turns with asymmetric speeds, semantic communication methods, and explainability. The study also highlighted the importance of customization to support users with diverse backgrounds and preferences, along with practical concerns such as battery life, maintenance, and weather issues. These findings offer valuable insights and design implications for future research and development of robotic guide dogs.