 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeBlack-Box Optimization of Object Detector Scales
Oct 29, 2020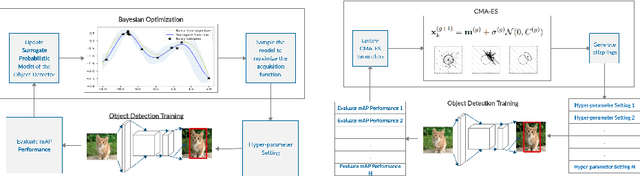
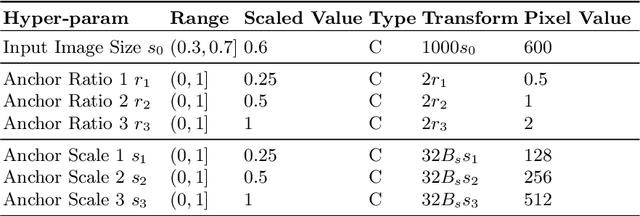
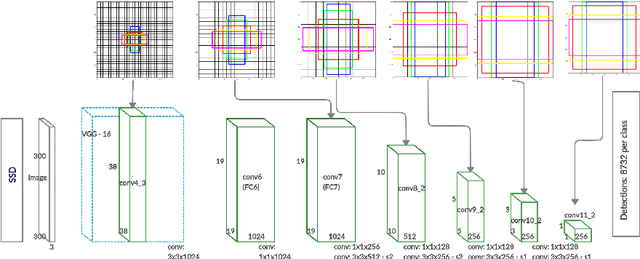
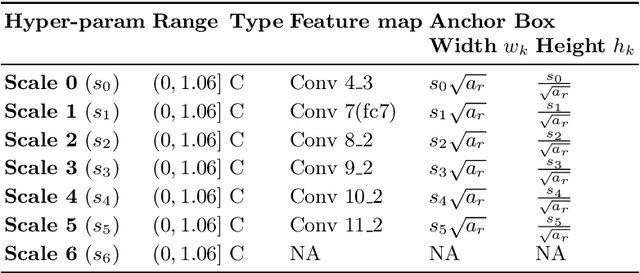
Object detectors have improved considerably in the last years by using advanced CNN architectures. However, many detector hyper-parameters are generally manually tuned, or they are used with values set by the detector authors. Automatic Hyper-parameter optimization has not been explored in improving CNN-based object detectors hyper-parameters. In this work, we propose the use of Black-box optimization methods to tune the prior/default box scales in Faster R-CNN and SSD, using Bayesian Optimization, SMAC, and CMA-ES. We show that by tuning the input image size and prior box anchor scale on Faster R-CNN mAP increases by 2% on PASCAL VOC 2007, and by 3% with SSD. On the COCO dataset with SSD there are mAP improvement in the medium and large objects, but mAP decreases by 1% in small objects. We also perform a regression analysis to find the significant hyper-parameters to tune.
Perception for Autonomous Systems (PAZ)
Oct 27, 2020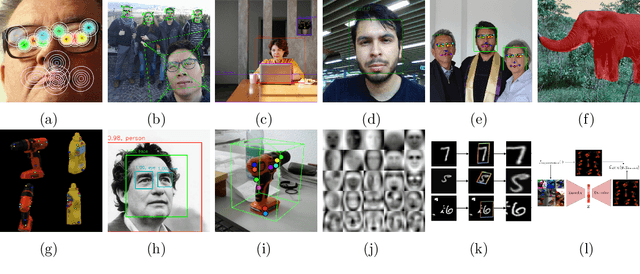
In this paper we introduce the Perception for Autonomous Systems (PAZ) software library. PAZ is a hierarchical perception library that allow users to manipulate multiple levels of abstraction in accordance to their requirements or skill level. More specifically, PAZ is divided into three hierarchical levels which we refer to as pipelines, processors, and backends. These abstractions allows users to compose functions in a hierarchical modular scheme that can be applied for preprocessing, data-augmentation, prediction and postprocessing of inputs and outputs of machine learning (ML) models. PAZ uses these abstractions to build reusable training and prediction pipelines for multiple robot perception tasks such as: 2D keypoint estimation, 2D object detection, 3D keypoint discovery, 6D pose estimation, emotion classification, face recognition, instance segmentation, and attention mechanisms.