 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePerception for Autonomous Systems (PAZ)
Paper and Code
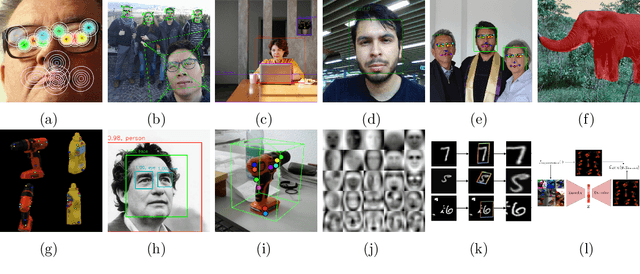
In this paper we introduce the Perception for Autonomous Systems (PAZ) software library. PAZ is a hierarchical perception library that allow users to manipulate multiple levels of abstraction in accordance to their requirements or skill level. More specifically, PAZ is divided into three hierarchical levels which we refer to as pipelines, processors, and backends. These abstractions allows users to compose functions in a hierarchical modular scheme that can be applied for preprocessing, data-augmentation, prediction and postprocessing of inputs and outputs of machine learning (ML) models. PAZ uses these abstractions to build reusable training and prediction pipelines for multiple robot perception tasks such as: 2D keypoint estimation, 2D object detection, 3D keypoint discovery, 6D pose estimation, emotion classification, face recognition, instance segmentation, and attention mechanisms.