 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePoint Spread Function Optimization for Communication-assisted UAV-borne MIMO TomoSAR
May 26, 2026This paper tackles the optimization of the point spread function (PSF) of unmanned aerial vehicle (UAV)-borne multiple-input multiple-output (MIMO) synthetic aperture radar (SAR) tomography systems. A swarm of UAV-borne SAR systems is deployed to image an area to obtain its height profile. To achieve a high-quality three-dimensional (3D) image of the scene, the PSF has to exhibit low sidelobes. The heavy computations, required for image generation, are performed on the ground. To this end, the sensor data collected by the UAV-SARs is offloaded in real time via a frequency division multiple access (FDMA) air-to-ground backhaul link. In this work, the UAV formation and the power allocated for offloading are jointly optimized for the minimization of the PSF sidelobe levels. To this end, we propose a novel solution based on the particle swarm optimization (PSO) algorithm, which meets practical sensing and communication constraints. Our simulation results demonstrate that the proposed solution can significantly improve sidelobe suppression compared to several benchmark schemes.
Sensing Accuracy Optimization for Communication-assisted Dual-baseline UAV-InSAR
Oct 24, 2024



In this paper, we study the optimization of the sensing accuracy of unmanned aerial vehicle (UAV)-based dual-baseline interferometric synthetic aperture radar (InSAR) systems. A swarm of three UAV-synthetic aperture radar (SAR) systems is deployed to image an area of interest from different angles, enabling the creation of two independent digital elevation models (DEMs). To reduce the InSAR sensing error, i.e., the height estimation error, the two DEMs are fused based on weighted average techniques into one final DEM. The heavy computations required for this process are performed on the ground. To this end, the radar data is offloaded in real time via a frequency division multiple access (FDMA) air-to-ground backhaul link. In this work, we focus on improving the sensing accuracy by minimizing the worst-case height estimation error of the final DEM. To this end, the UAV formation and the power allocated for offloading are jointly optimized based on alternating optimization (AO), while meeting practical InSAR sensing and communication constraints. Our simulation results demonstrate that the proposed solution can improve the sensing accuracy by over 39% compared to a classical single-baseline UAV-InSAR system and by more than 12% compared to other benchmark schemes.
UAV Formation and Resource Allocation Optimization for Communication-Assisted 3D InSAR Sensing
Jul 09, 2024



In this paper, we investigate joint unmanned aerial vehicle (UAV) formation and resource allocation optimization for communication-assisted three-dimensional (3D) synthetic aperture radar (SAR) sensing. We consider a system consisting of two UAVs that perform bistatic interferometric SAR (InSAR) sensing for generation of a digital elevation model (DEM) and transmit the radar raw data to a ground station (GS) in real time. To account for practical 3D sensing requirements, we use non-conventional sensing performance metrics, such as the SAR interferometric coherence, i.e., the local cross-correlation between the two co-registered UAV SAR images, the point-to-point InSAR relative height error, and the height of ambiguity, which together characterize the accuracy with which the InSAR system can determine the height of ground targets. Our objective is to jointly optimize the UAV formation, speed, and communication power allocation for maximization of the InSAR coverage while satisfying energy, communication, and InSAR-specific sensing constraints. To solve the formulated non-smooth and non-convex optimization problem, we divide it into three sub-problems and propose a novel alternating optimization (AO) framework that is based on classical, monotonic, and stochastic optimization techniques. The effectiveness of the proposed algorithm is validated through extensive simulations and compared to several benchmark schemes. Furthermore, our simulation results highlight the impact of the UAV-GS communication link on the flying formation and sensing performance and show that the DEM of a large area of interest can be mapped and offloaded to ground successfully, while the ground topography can be estimated with centimeter-scale precision. Lastly, we demonstrate that a low UAV velocity is preferable for InSAR applications as it leads to better sensing accuracy.
Robust Trajectory and Resource Optimization for Communication-assisted UAV SAR Sensing
Apr 01, 2024



In this paper, we investigate joint 3-dimensional (3D) trajectory planning and resource allocation for rotary-wing unmanned aerial vehicle (UAV) synthetic aperture radar (SAR) sensing. To support emerging real-time SAR applications and enable live mission control, we incorporate real-time communication with a ground station (GS). The UAV's main mission is the mapping of large areas of interest (AoIs) using an onboard SAR system and transferring the unprocessed raw radar data to the ground in real time. We propose a robust trajectory and resource allocation design that takes into account random UAV trajectory deviations. To this end, we model the UAV trajectory deviations and study their effect on the radar coverage. Then, we formulate a robust non-convex mixed-integer non-linear program (MINLP) such that the UAV 3D trajectory and resources are jointly optimized for maximization of the radar ground coverage. A low-complexity sub-optimal solution for the formulated problem is presented. Furthermore, to assess the performance of the sub-optimal algorithm, we derive an upper bound on the optimal solution based on monotonic optimization theory. Simulation results show that the proposed sub-optimal algorithm achieves close-to-optimal performance and not only outperforms several benchmark schemes but is also robust with respect to UAV trajectory deviations.
UAV Formation Optimization for Communication-assisted InSAR Sensing
Nov 12, 2023



Interferometric synthetic aperture radar (InSAR) is an increasingly important remote sensing technique that enables three-dimensional (3D) sensing applications such as the generation of accurate digital elevation models (DEMs). In this paper, we investigate the joint formation and communication resource allocation optimization for a system comprising two unmanned aerial vehicles (UAVs) to perform InSAR sensing and to transfer the acquired data to the ground. To this end, we adopt as sensing performance metrics the interferometric coherence, i.e., the local correlation between the two co-registered UAV radar images, and the height of ambiguity (HoA), which together are a measure for the accuracy with which the InSAR system can estimate the height of ground objects. In addition, an analytical expression for the coverage of the considered InSAR sensing system is derived. Our objective is to maximize the InSAR coverage while satisfying all relevant InSAR-specific sensing and communication performance metrics. To tackle the non-convexity of the formulated optimization problem, we employ alternating optimization (AO) techniques combined with successive convex approximation (SCA). Our simulation results reveal that the resulting resource allocation algorithm outperforms two benchmark schemes in terms of InSAR coverage while satisfying all sensing and real-time communication requirements. Furthermore, we highlight the importance of efficient communication resource allocation in facilitating real-time sensing and unveil the trade-off between InSAR height estimation accuracy and coverage.
Laser-Powered UAVs for Wireless Communication Coverage: A Large-Scale Deployment Strategy
Aug 25, 2022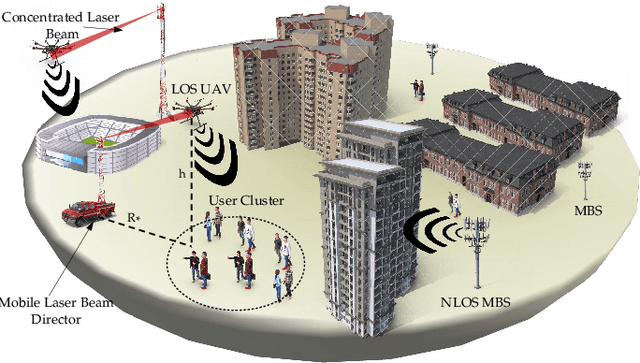
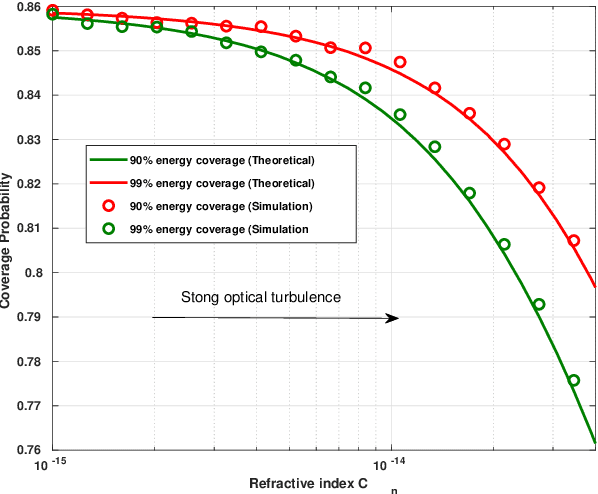

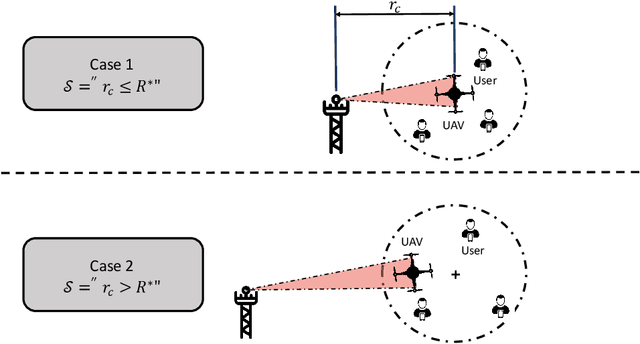
The use of unmanned aerial vehicles (UAVs) is strongly advocated for sixth-generation (6G) networks, as the 6G standard will not be limited to improving broadband services, but will also target the extension of the geographical cellular coverage. In this context, the deployment of UAVs is considered a key solution for seamless connectivity and reliable coverage. That being said, it is important to underline that although UAVs are characterized by their high mobility and their ability to establish line-of-sight (LOS) links, their use is still impeded by several factors such as weather conditions, their limited computing power, and, most importantly, their limited energy. In this work, we are aiming for the novel technology that enables indefinite wireless power transfer for UAVs using laser beams. We propose a novel UAV deployment strategy, based on which we analyze the overall performance of the system in terms of wireless coverage. To this end, we use tractable tools from stochastic geometry to model the complex communication system. We analyze the user's connectivity profile under different laser charging capabilities and in different type of environments. We show a decrease in the coverage probability by more than 12% in moderate-to-strong turbulence conditions compared to low turbulence conditions. We also show how the connection rate to the aerial network significantly decreases in favor of the terrestrial network for short laser charging ranges. We conclude that laser-powered drones are considered interesting alternatives when placed in LOS with users, in low-to-moderate optical turbulence, and at reasonable ranges from the charging stations.
Trajectory and Resource Optimization for UAV Synthetic Aperture Radar
Jul 12, 2022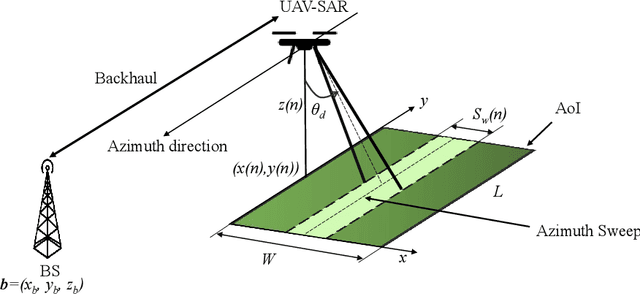
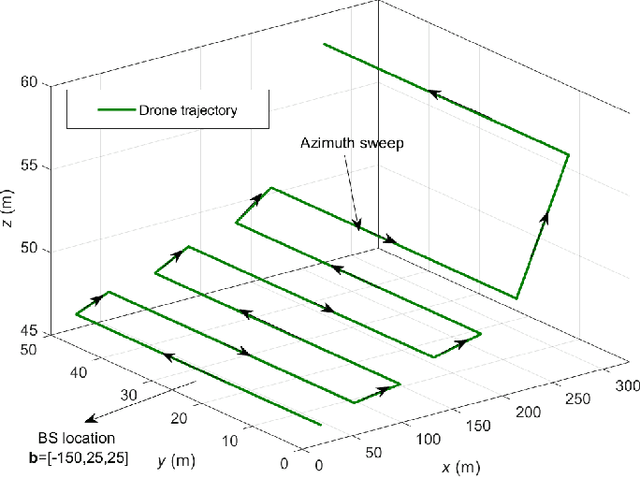
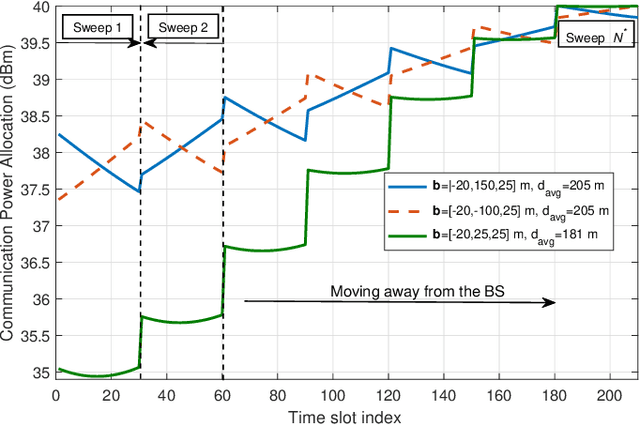
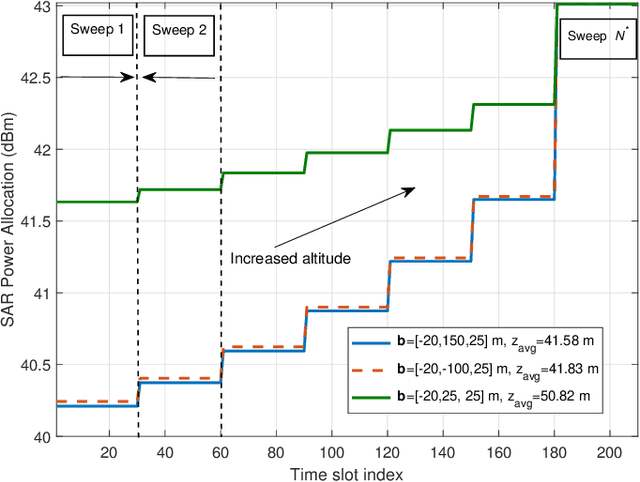
In this paper, we study the trajectory and resource optimization for lightweight rotary-wing unmanned aerial vehicles (UAVs) equipped with a synthetic aperture radar (SAR) system. The UAV's mission is to perform SAR imaging of a given area of interest (AoI). In this setup, real-time communication with a base station (BS) is required to facilitate live mission planning for the drone. For this purpose, a non-convex mixed-integer non-linear program (MINLP) is formulated such that the UAV resources and three-dimensional (3D) trajectory are jointly optimized for maximization of the drone radar ground coverage. We present a low-complexity sub-optimal algorithm based on successive convex approximation (SCA) for solving the problem, and perform a finite search to optimize the total distance traversed by the UAV for maximal coverage. We show that the proposed 3D trajectory planning achieves at least 70% improvement in radar ground coverage compared to benchmark schemes employing constant powers for communication or radar imaging. We also show that positioning the BS near the AoI can significantly improve the radar coverage of the UAV.
Machine learning for UAV-Based networks
Sep 24, 2020
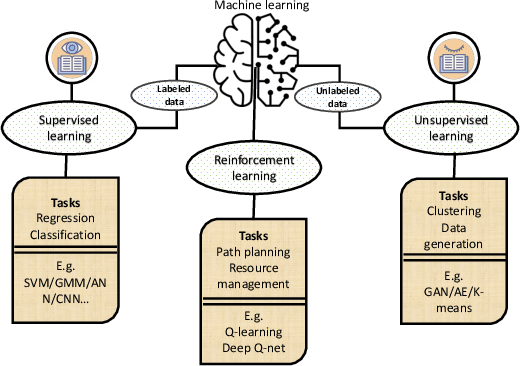
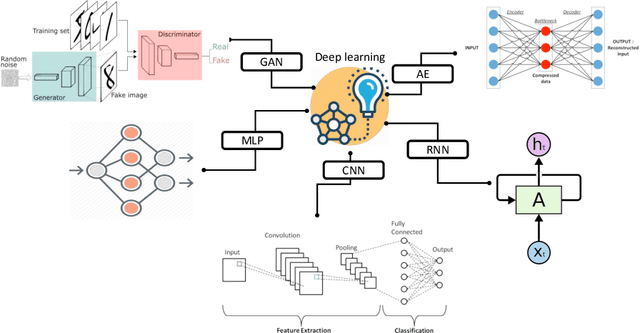
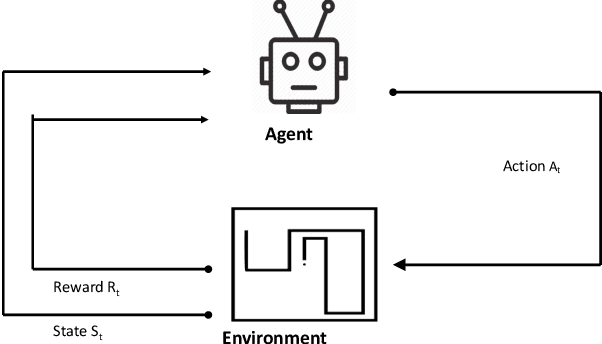
Unmanned aerial vehicles (UAVs) are considered as one of the promising technologies for the next-generation wireless communication networks. Their mobility and their ability to establish a line of sight (LOS) links with the users made them key solutions for many potential applications. In the same vein, artificial intelligence is growing rapidly nowadays and has been very successful, particularly due to the massive amount of the available data. As a result, a significant part of the research community has started to integrate intelligence at the core of UAVs networks by applying machine learning (ML) algorithms in solving several problems in relation to drones. In this article, we provide a comprehensive overview of some potential applications of ML in UAV-Based networks. We will also highlight the limits of the existing works and outline some potential future applications of ML for UAVs networks.