 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeIntent Profiling and Translation Through Emergent Communication
Feb 05, 2024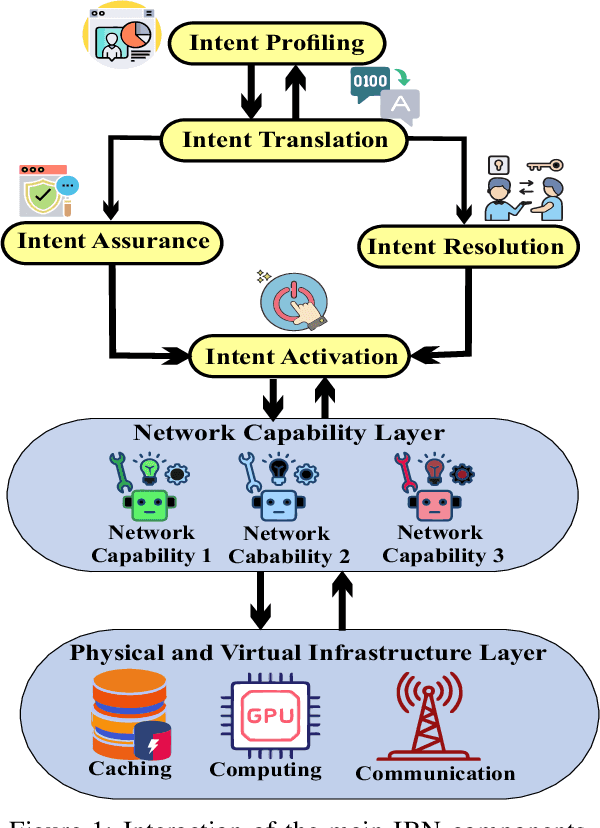
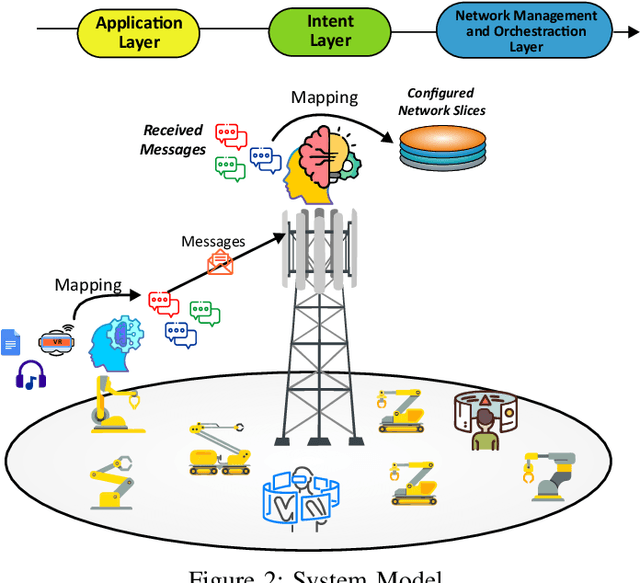
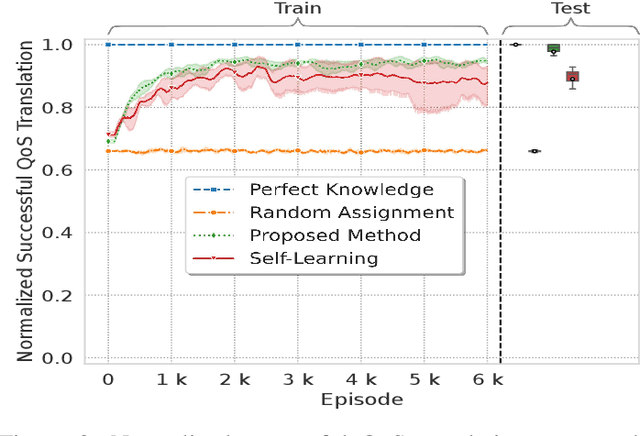
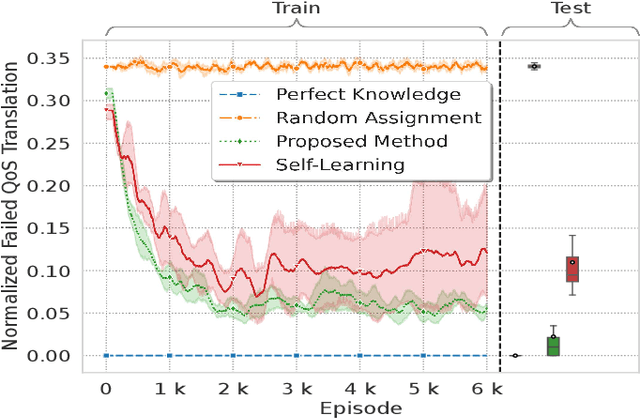
To effectively express and satisfy network application requirements, intent-based network management has emerged as a promising solution. In intent-based methods, users and applications express their intent in a high-level abstract language to the network. Although this abstraction simplifies network operation, it induces many challenges to efficiently express applications' intents and map them to different network capabilities. Therefore, in this work, we propose an AI-based framework for intent profiling and translation. We consider a scenario where applications interacting with the network express their needs for network services in their domain language. The machine-to-machine communication (i.e., between applications and the network) is complex since it requires networks to learn how to understand the domain languages of each application, which is neither practical nor scalable. Instead, a framework based on emergent communication is proposed for intent profiling, in which applications express their abstract quality-of-experience (QoE) intents to the network through emergent communication messages. Subsequently, the network learns how to interpret these communication messages and map them to network capabilities (i.e., slices) to guarantee the requested Quality-of-Service (QoS). Simulation results show that the proposed method outperforms self-learning slicing and other baselines, and achieves a performance close to the perfect knowledge baseline.
Vehicular Cooperative Perception Through Action Branching and Federated Reinforcement Learning
Dec 07, 2020
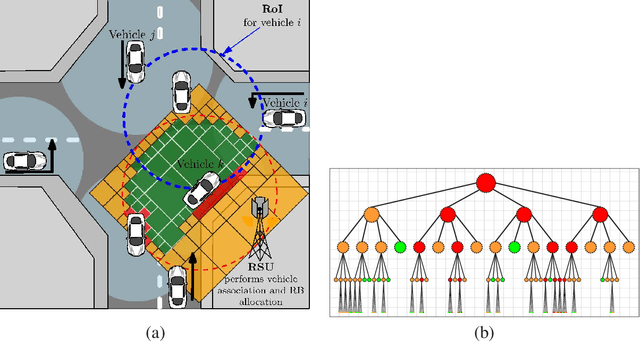

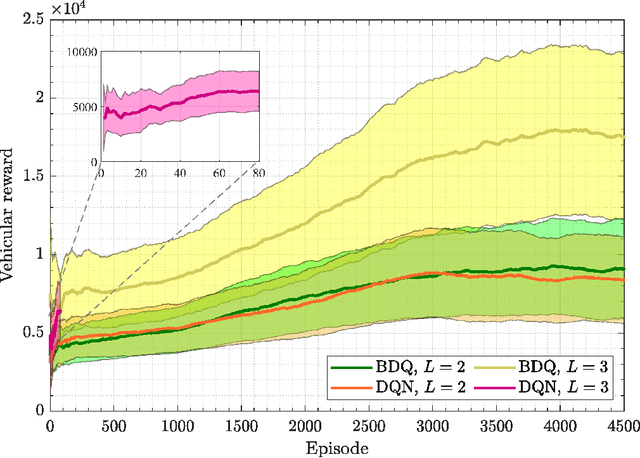
Cooperative perception plays a vital role in extending a vehicle's sensing range beyond its line-of-sight. However, exchanging raw sensory data under limited communication resources is infeasible. Towards enabling an efficient cooperative perception, vehicles need to address the following fundamental question: What sensory data needs to be shared?, at which resolution?, and with which vehicles? To answer this question, in this paper, a novel framework is proposed to allow reinforcement learning (RL)-based vehicular association, resource block (RB) allocation, and content selection of cooperative perception messages (CPMs) by utilizing a quadtree-based point cloud compression mechanism. Furthermore, a federated RL approach is introduced in order to speed up the training process across vehicles. Simulation results show the ability of the RL agents to efficiently learn the vehicles' association, RB allocation, and message content selection while maximizing vehicles' satisfaction in terms of the received sensory information. The results also show that federated RL improves the training process, where better policies can be achieved within the same amount of time compared to the non-federated approach.
Ultra-Reliable and Low-Latency Vehicular Communication: An Active Learning Approach
Nov 27, 2019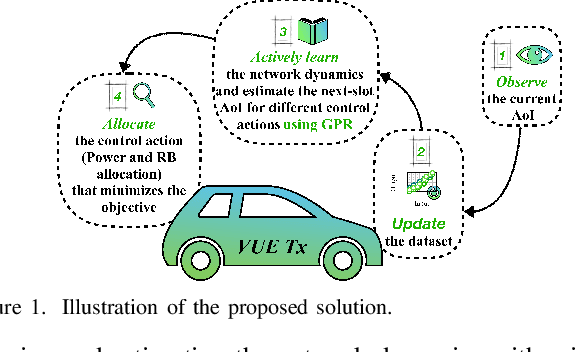
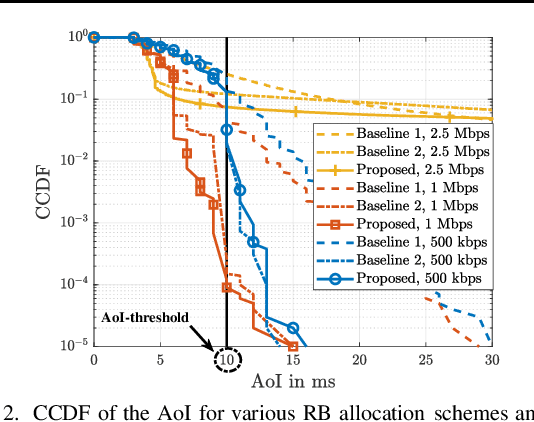
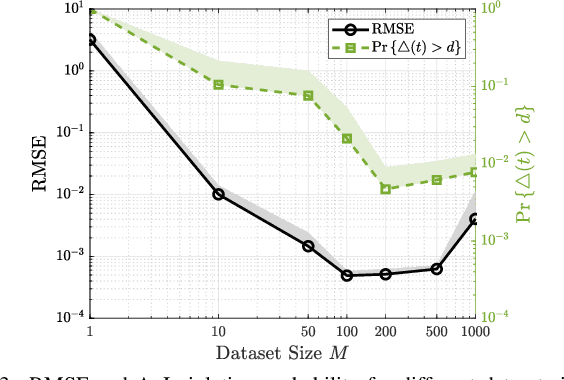
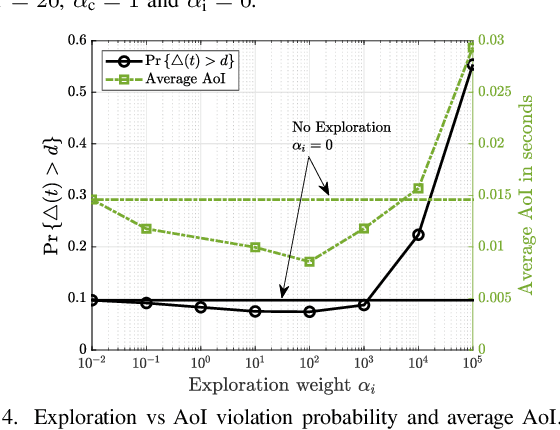
In this letter, an age of information (AoI)-aware transmission power and resource block (RB) allocation technique for vehicular communication networks is proposed. Due to the highly dynamic nature of vehicular networks, gaining a prior knowledge about the network dynamics, i.e., wireless channels and interference, in order to allocate resources, is challenging. Therefore, to effectively allocate power and RBs, the proposed approach allows the network to actively learn its dynamics by balancing a tradeoff between minimizing the probability that the vehicles' AoI exceeds a predefined threshold and maximizing the knowledge about the network dynamics. In this regard, using a Gaussian process regression (GPR) approach, an online decentralized strategy is proposed to actively learn the network dynamics, estimate the vehicles' future AoI, and proactively allocate resources. Simulation results show a significant improvement in terms of AoI violation probability, compared to several baselines, with a reduction of at least 50%.