 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAgriGS-SLAM: Orchard Mapping Across Seasons via Multi-View Gaussian Splatting SLAM
Oct 30, 2025Autonomous robots in orchards require real-time 3D scene understanding despite repetitive row geometry, seasonal appearance changes, and wind-driven foliage motion. We present AgriGS-SLAM, a Visual--LiDAR SLAM framework that couples direct LiDAR odometry and loop closures with multi-camera 3D Gaussian Splatting (3DGS) rendering. Batch rasterization across complementary viewpoints recovers orchard structure under occlusions, while a unified gradient-driven map lifecycle executed between keyframes preserves fine details and bounds memory. Pose refinement is guided by a probabilistic LiDAR-based depth consistency term, back-propagated through the camera projection to tighten geometry-appearance coupling. We deploy the system on a field platform in apple and pear orchards across dormancy, flowering, and harvesting, using a standardized trajectory protocol that evaluates both training-view and novel-view synthesis to reduce 3DGS overfitting in evaluation. Across seasons and sites, AgriGS-SLAM delivers sharper, more stable reconstructions and steadier trajectories than recent state-of-the-art 3DGS-SLAM baselines while maintaining real-time performance on-tractor. While demonstrated in orchard monitoring, the approach can be applied to other outdoor domains requiring robust multimodal perception.
Advancements in Radar Odometry
Oct 19, 2023



Radar odometry estimation has emerged as a critical technique in the field of autonomous navigation, providing robust and reliable motion estimation under various environmental conditions. Despite its potential, the complex nature of radar signals and the inherent challenges associated with processing these signals have limited the widespread adoption of this technology. This paper aims to address these challenges by proposing novel improvements to an existing method for radar odometry estimation, designed to enhance accuracy and reliability in diverse scenarios. Our pipeline consists of filtering, motion compensation, oriented surface points computation, smoothing, one-to-many radar scan registration, and pose refinement. The developed method enforces local understanding of the scene, by adding additional information through smoothing techniques, and alignment of consecutive scans, as a refinement posterior to the one-to-many registration. We present an in-depth investigation of the contribution of each improvement to the localization accuracy, and we benchmark our system on the sequences of the main datasets for radar understanding, i.e., the Oxford Radar RobotCar, MulRan, and Boreas datasets. The proposed pipeline is able to achieve superior results, on all scenarios considered and under harsh environmental constraints.
RadarLCD: Learnable Radar-based Loop Closure Detection Pipeline
Sep 13, 2023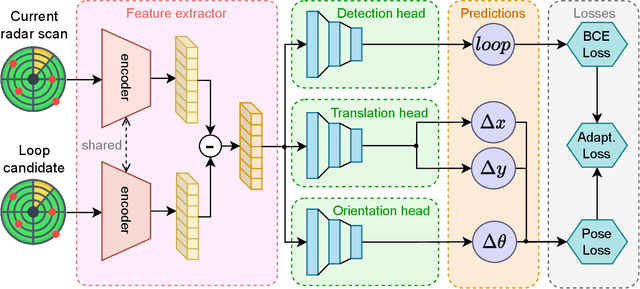
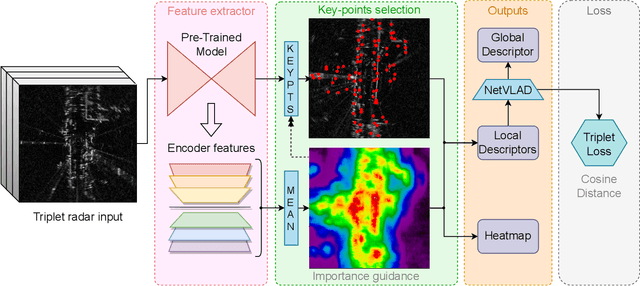
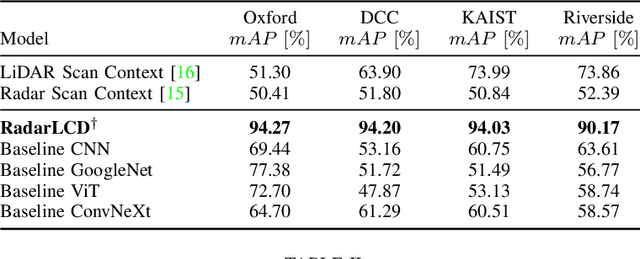
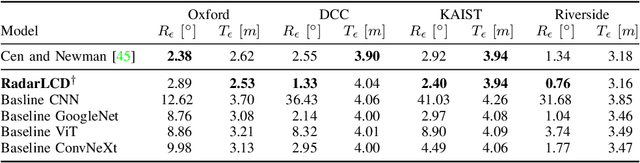
Loop Closure Detection (LCD) is an essential task in robotics and computer vision, serving as a fundamental component for various applications across diverse domains. These applications encompass object recognition, image retrieval, and video analysis. LCD consists in identifying whether a robot has returned to a previously visited location, referred to as a loop, and then estimating the related roto-translation with respect to the analyzed location. Despite the numerous advantages of radar sensors, such as their ability to operate under diverse weather conditions and provide a wider range of view compared to other commonly used sensors (e.g., cameras or LiDARs), integrating radar data remains an arduous task due to intrinsic noise and distortion. To address this challenge, this research introduces RadarLCD, a novel supervised deep learning pipeline specifically designed for Loop Closure Detection using the FMCW Radar (Frequency Modulated Continuous Wave) sensor. RadarLCD, a learning-based LCD methodology explicitly designed for radar systems, makes a significant contribution by leveraging the pre-trained HERO (Hybrid Estimation Radar Odometry) model. Being originally developed for radar odometry, HERO's features are used to select key points crucial for LCD tasks. The methodology undergoes evaluation across a variety of FMCW Radar dataset scenes, and it is compared to state-of-the-art systems such as Scan Context for Place Recognition and ICP for Loop Closure. The results demonstrate that RadarLCD surpasses the alternatives in multiple aspects of Loop Closure Detection.