 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCAT: Contrastive Adversarial Training for Evaluating the Robustness of Protective Perturbations in Latent Diffusion Models
Feb 11, 2025Latent diffusion models have recently demonstrated superior capabilities in many downstream image synthesis tasks. However, customization of latent diffusion models using unauthorized data can severely compromise the privacy and intellectual property rights of data owners. Adversarial examples as protective perturbations have been developed to defend against unauthorized data usage by introducing imperceptible noise to customization samples, preventing diffusion models from effectively learning them. In this paper, we first reveal that the primary reason adversarial examples are effective as protective perturbations in latent diffusion models is the distortion of their latent representations, as demonstrated through qualitative and quantitative experiments. We then propose the Contrastive Adversarial Training (CAT) utilizing adapters as an adaptive attack against these protection methods, highlighting their lack of robustness. Extensive experiments demonstrate that our CAT method significantly reduces the effectiveness of protective perturbations in customization configurations, urging the community to reconsider and enhance the robustness of existing protective perturbation methods. Code is available at \hyperlink{here}{https://github.com/senp98/CAT}.
Protective Perturbations against Unauthorized Data Usage in Diffusion-based Image Generation
Dec 25, 2024
Diffusion-based text-to-image models have shown immense potential for various image-related tasks. However, despite their prominence and popularity, customizing these models using unauthorized data also brings serious privacy and intellectual property issues. Existing methods introduce protective perturbations based on adversarial attacks, which are applied to the customization samples. In this systematization of knowledge, we present a comprehensive survey of protective perturbation methods designed to prevent unauthorized data usage in diffusion-based image generation. We establish the threat model and categorize the downstream tasks relevant to these methods, providing a detailed analysis of their designs. We also propose a completed evaluation framework for these perturbation techniques, aiming to advance research in this field.
Automated Noncontact Trapping of Moving Micro-particle with Ultrasonic Phased Array System and Microscopic Vision
Aug 22, 2022
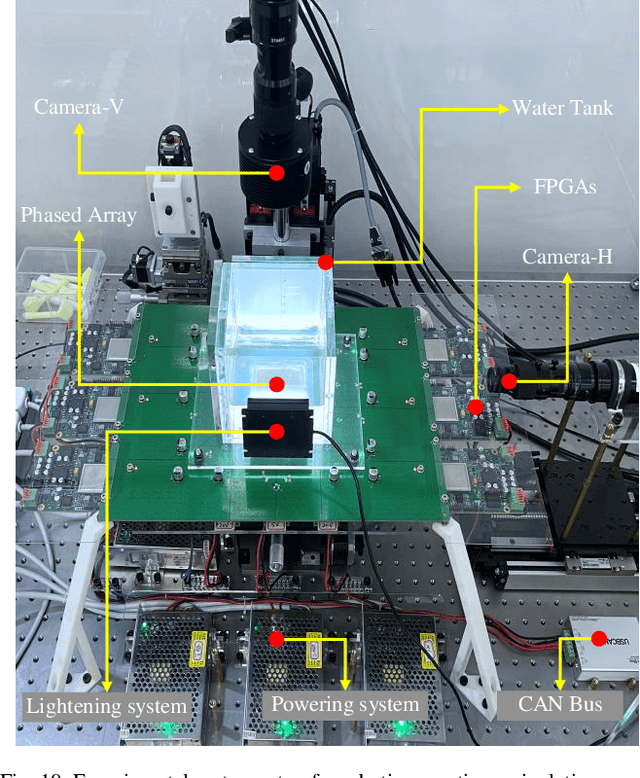


Noncontact particle manipulation (NPM) technology has significantly extended mankind's analysis capability into micro and nano scale, which in turn greatly promoted the development of material science and life science. Though NPM by means of electric, magnetic, and optical field has achieved great success, from the robotic perspective, it is still labor-intensive manipulation since professional human assistance is somehow mandatory in early preparation stage. Therefore, developing automated noncontact trapping of moving particles is worthwhile, particularly for applications where particle samples are rare, fragile or contact sensitive. Taking advantage of latest dynamic acoustic field modulating technology, and particularly by virtue of the great scalability of acoustic manipulation from micro-scale to sub-centimeter-scale, we propose an automated noncontact trapping of moving micro-particles with ultrasonic phased array system and microscopic vision in this paper. The main contribution of this work is for the first time, as far as we know, we achieved fully automated moving micro-particle trapping in acoustic NPM field by resorting to robotic approach. In short, the particle moving status is observed and predicted by binocular microscopic vision system, by referring to which the acoustic trapping zone is calculated and generated to capture and stably hold the particle. The problem of hand-eye relationship of noncontact robotic end-effector is also solved in this work. Experiments demonstrated the effectiveness of this work.