 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHAGEN: Homophily-Aware Graph Convolutional Recurrent Network for Crime Forecasting
Sep 27, 2021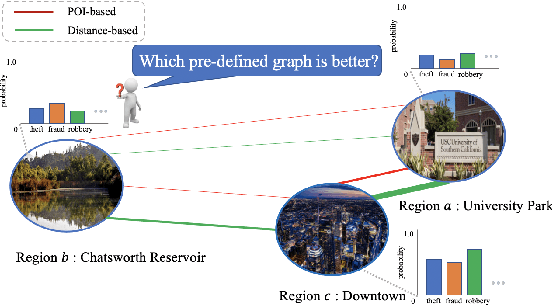
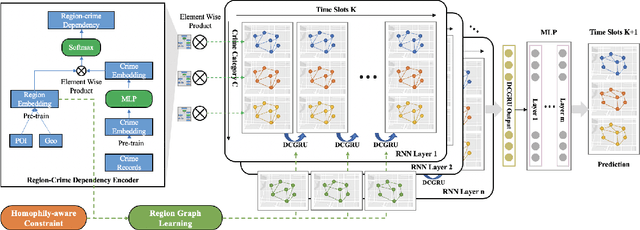
The crime forecasting is an important problem as it greatly contributes to urban safety. Typically, the goal of the problem is to predict different types of crimes for each geographical region (like a neighborhood or censor tract) in the near future. Since nearby regions usually have similar socioeconomic characteristics which indicate similar crime patterns, recent state-of-the-art solutions constructed a distance-based region graph and utilized Graph Neural Network (GNN) techniques for crime forecasting, because the GNN techniques could effectively exploit the latent relationships between neighboring region nodes in the graph. However, this distance-based pre-defined graph cannot fully capture crime correlation between regions that are far from each other but share similar crime patterns. Hence, to make an accurate crime prediction, the main challenge is to learn a better graph that reveals the dependencies between regions in crime occurrences and meanwhile captures the temporal patterns from historical crime records. To address these challenges, we propose an end-to-end graph convolutional recurrent network called HAGEN with several novel designs for crime prediction. Specifically, our framework could jointly capture the crime correlation between regions and the temporal crime dynamics by combining an adaptive region graph learning module with the Diffusion Convolution Gated Recurrent Unit (DCGRU). Based on the homophily assumption of GNN, we propose a homophily-aware constraint to regularize the optimization of the region graph so that neighboring region nodes on the learned graph share similar crime patterns, thus fitting the mechanism of diffusion convolution. It also incorporates crime embedding to model the interdependencies between regions and crime categories. Empirical experiments and comprehensive analysis on two real-world datasets showcase the effectiveness of HAGEN.
DETECT: Deep Trajectory Clustering for Mobility-Behavior Analysis
Mar 03, 2020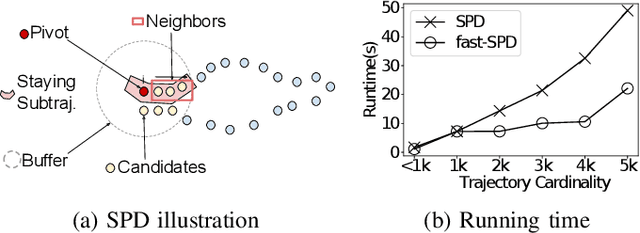
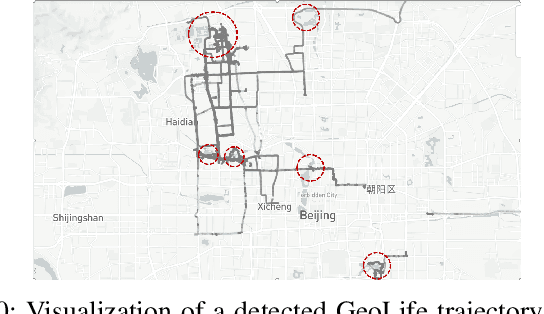
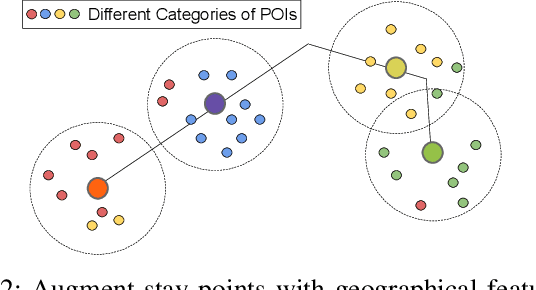
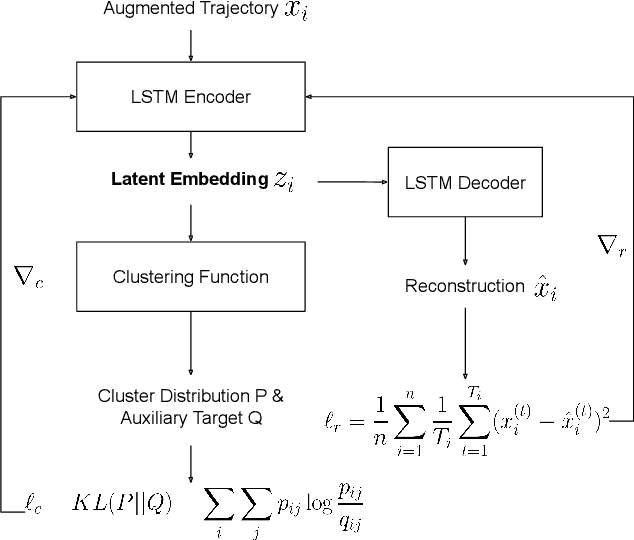
Identifying mobility behaviors in rich trajectory data is of great economic and social interest to various applications including urban planning, marketing and intelligence. Existing work on trajectory clustering often relies on similarity measurements that utilize raw spatial and/or temporal information of trajectories. These measures are incapable of identifying similar moving behaviors that exhibit varying spatio-temporal scales of movement. In addition, the expense of labeling massive trajectory data is a barrier to supervised learning models. To address these challenges, we propose an unsupervised neural approach for mobility behavior clustering, called the Deep Embedded TrajEctory ClusTering network (DETECT). DETECT operates in three parts: first it transforms the trajectories by summarizing their critical parts and augmenting them with context derived from their geographical locality (e.g., using POIs from gazetteers). In the second part, it learns a powerful representation of trajectories in the latent space of behaviors, thus enabling a clustering function (such as $k$-means) to be applied. Finally, a clustering oriented loss is directly built on the embedded features to jointly perform feature refinement and cluster assignment, thus improving separability between mobility behaviors. Exhaustive quantitative and qualitative experiments on two real-world datasets demonstrate the effectiveness of our approach for mobility behavior analyses.