 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGrasp What You Want: Embodied Dexterous Grasping System Driven by Your Voice
Dec 14, 2024In recent years, as robotics has advanced, human-robot collaboration has gained increasing importance. However, current robots struggle to fully and accurately interpret human intentions from voice commands alone. Traditional gripper and suction systems often fail to interact naturally with humans, lack advanced manipulation capabilities, and are not adaptable to diverse tasks, especially in unstructured environments. This paper introduces the Embodied Dexterous Grasping System (EDGS), designed to tackle object grasping in cluttered environments for human-robot interaction. We propose a novel approach to semantic-object alignment using a Vision-Language Model (VLM) that fuses voice commands and visual information, significantly enhancing the alignment of multi-dimensional attributes of target objects in complex scenarios. Inspired by human hand-object interactions, we develop a robust, precise, and efficient grasping strategy, incorporating principles like the thumb-object axis, multi-finger wrapping, and fingertip interaction with an object's contact mechanics. We also design experiments to assess Referring Expression Representation Enrichment (RERE) in referring expression segmentation, demonstrating that our system accurately detects and matches referring expressions. Extensive experiments confirm that EDGS can effectively handle complex grasping tasks, achieving stability and high success rates, highlighting its potential for further development in the field of Embodied AI.
Probabilistic Bearing Fault Diagnosis Using Gaussian Process with Tailored Feature Extraction
Sep 19, 2021
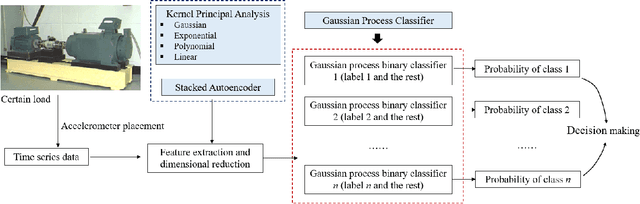

Rolling bearings are subject to various faults due to its long-time operation under harsh environment, which will lead to unexpected breakdown of machinery system and cause severe accidents. Deep learning methods recently have gained growing interests and extensively applied in the data-driven bearing fault diagnosis. However, current deep learning methods perform the bearing fault diagnosis in the form of deterministic classification, which overlook the uncertainties that inevitably exist in actual practice. To tackle this issue, in this research we develop a probabilistic fault diagnosis framework that can account for the uncertainty effect in prediction, which bears practical significance. This framework fully leverages the probabilistic feature of Gaussian process classifier (GPC). To facilitate the establishment of high-fidelity GPC, the tailored feature extraction with dimensionality reduction method can be optimally determined through the cross validation-based grid search upon a prespecified method pool consisting of various kernel principal component analysis (KPCA) methods and stacked autoencoder. This strategy can ensure the complex nonlinear relations between the features and faults to be adequately characterized. Furthermore, the sensor fusion concept is adopted to enhance the diagnosis performance. As compared with the traditional deep learning methods, this proposed framework usually requires less labeled data and less effort for parameter tuning. Systematic case studies using the publicly accessible experimental rolling bearing dataset are carried out to validate this new framework. Various influencing factors on fault diagnosis performance also are thoroughly investigated.