 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAn Overview of Depth Cameras and Range Scanners Based on Time-of-Flight Technologies
Dec 12, 2020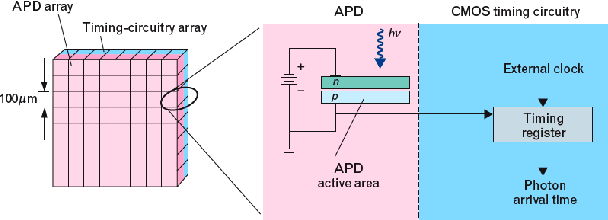

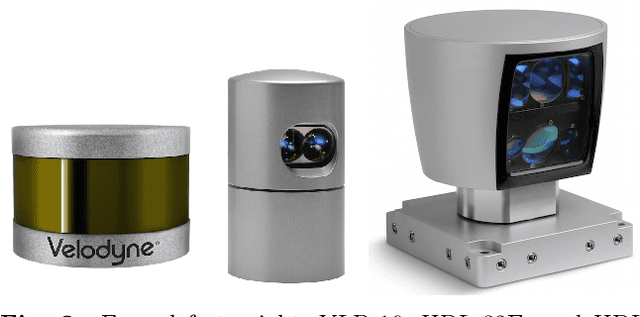

Time-of-flight (TOF) cameras are sensors that can measure the depths of scene-points, by illuminating the scene with a controlled laser or LED source, and then analyzing the reflected light. In this paper, we will first describe the underlying measurement principles of time-of-flight cameras, including: (i) pulsed-light cameras, which measure directly the time taken for a light pulse to travel from the device to the object and back again, and (ii) continuous-wave modulated-light cameras, which measure the phase difference between the emitted and received signals, and hence obtain the travel time indirectly. We review the main existing designs, including prototypes as well as commercially available devices. We also review the relevant camera calibration principles, and how they are applied to TOF devices. Finally, we discuss the benefits and challenges of combined TOF and color camera systems.
Fusion of Range and Stereo Data for High-Resolution Scene-Modeling
Dec 12, 2020

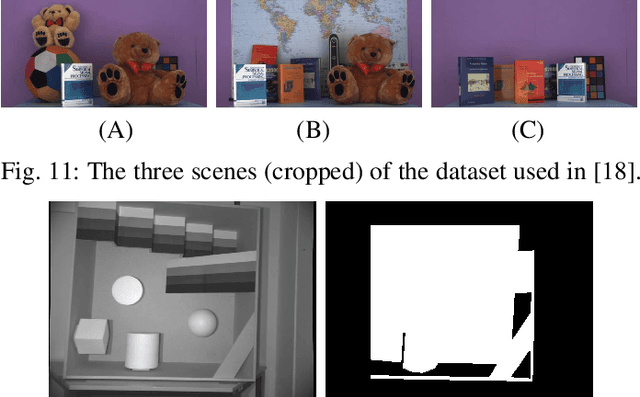
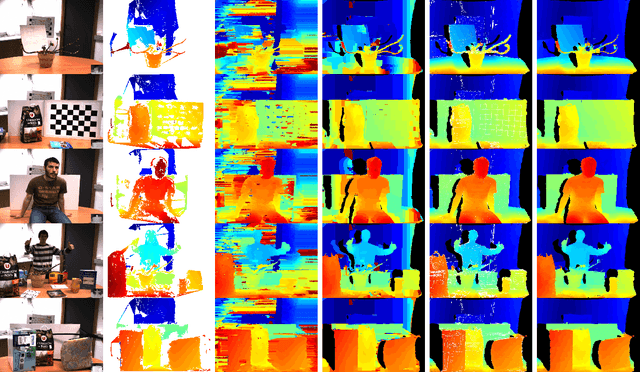
This paper addresses the problem of range-stereo fusion, for the construction of high-resolution depth maps. In particular, we combine low-resolution depth data with high-resolution stereo data, in a maximum a posteriori (MAP) formulation. Unlike existing schemes that build on MRF optimizers, we infer the disparity map from a series of local energy minimization problems that are solved hierarchically, by growing sparse initial disparities obtained from the depth data. The accuracy of the method is not compromised, owing to three properties of the data-term in the energy function. Firstly, it incorporates a new correlation function that is capable of providing refined correlations and disparities, via subpixel correction. Secondly, the correlation scores rely on an adaptive cost aggregation step, based on the depth data. Thirdly, the stereo and depth likelihoods are adaptively fused, based on the scene texture and camera geometry. These properties lead to a more selective growing process which, unlike previous seed-growing methods, avoids the tendency to propagate incorrect disparities. The proposed method gives rise to an intrinsically efficient algorithm, which runs at 3FPS on 2.0MP images on a standard desktop computer. The strong performance of the new method is established both by quantitative comparisons with state-of-the-art methods, and by qualitative comparisons using real depth-stereo data-sets.
Cyclopean Geometry of Binocular Vision
Dec 11, 2020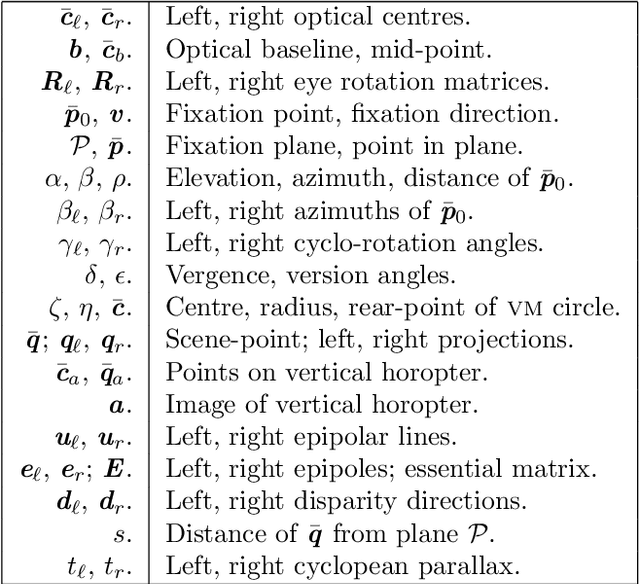
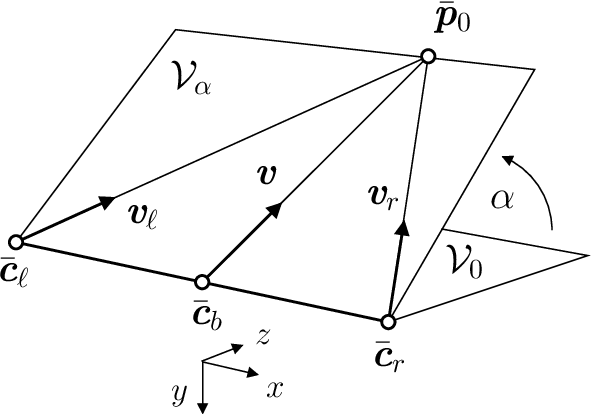
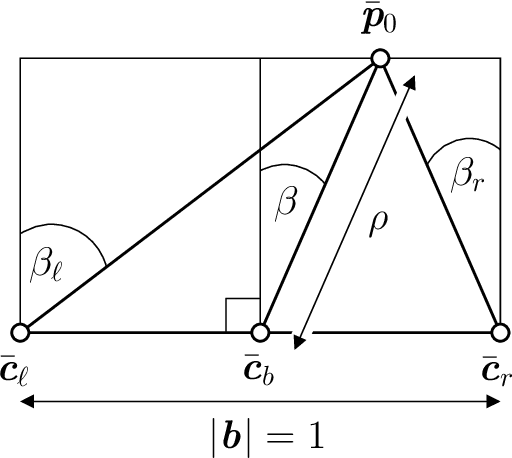
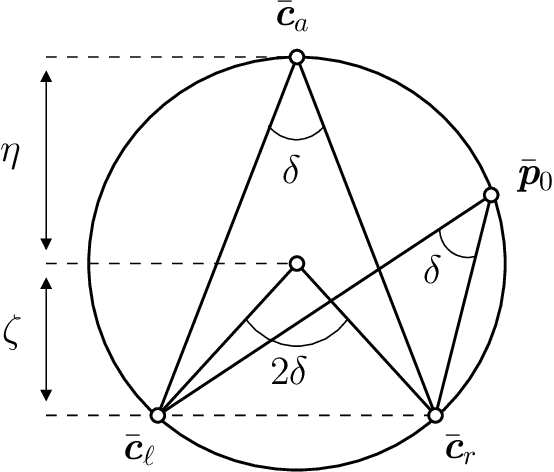
The geometry of binocular projection is analyzed, with reference to the primate visual system. In particular, the effects of coordinated eye movements on the retinal images are investigated. An appropriate oculomotor parameterization is defined, and is shown to complement the classical version and vergence angles. The midline horopter is identified, and subsequently used to construct the epipolar geometry of the system. It is shown that the Essential matrix can be obtained by combining the epipoles with the projection of the midline horopter. A local model of the scene is adopted, in which depth is measured relative to a plane containing the fixation point. The binocular disparity field is given a symmetric parameterization, in which the unknown scene-depths determine the location of corresponding image-features. The resulting Cyclopean depth-map can be combined with the estimated oculomotor parameters, to produce a local representation of the scene. The recovery of visual direction and depth from retinal images is discussed, with reference to the relevant psychophysical and neurophysiological literature.
A Differential Model of the Complex Cell
Dec 09, 2020The receptive fields of simple cells in the visual cortex can be understood as linear filters. These filters can be modelled by Gabor functions, or by Gaussian derivatives. Gabor functions can also be combined in an `energy model' of the complex cell response. This paper proposes an alternative model of the complex cell, based on Gaussian derivatives. It is most important to account for the insensitivity of the complex response to small shifts of the image. The new model uses a linear combination of the first few derivative filters, at a single position, to approximate the first derivative filter, at a series of adjacent positions. The maximum response, over all positions, gives a signal that is insensitive to small shifts of the image. This model, unlike previous approaches, is based on the scale space theory of visual processing. In particular, the complex cell is built from filters that respond to the \twod\ differential structure of the image. The computational aspects of the new model are studied in one and two dimensions, using the steerability of the Gaussian derivatives. The response of the model to basic images, such as edges and gratings, is derived formally. The response to natural images is also evaluated, using statistical measures of shift insensitivity. The relevance of the new model to the cortical image representation is discussed.
Robust and fast generation of top and side grasps for unknown objects
Jul 18, 2019

In this work, we present a geometry-based grasping algorithm that is capable of efficiently generating both top and side grasps for unknown objects, using a single view RGB-D camera, and of selecting the most promising one. We demonstrate the effectiveness of our approach on a picking scenario on a real robot platform. Our approach has shown to be more reliable than another recent geometry-based method considered as baseline [7] in terms of grasp stability, by increasing the successful grasp attempts by a factor of six.
* Extended abstract
Metrics and Benchmarks for Remote Shared Controllers in Industrial Applications
Jun 19, 2019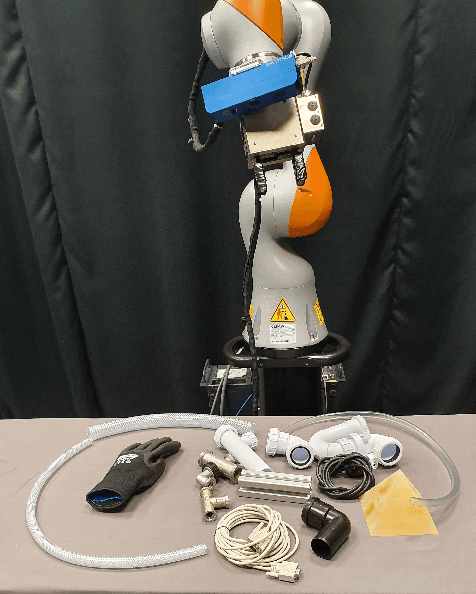

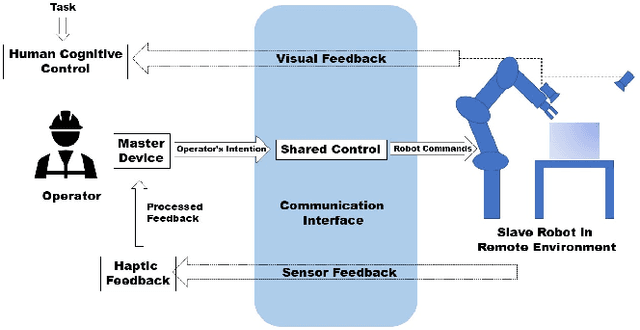

Remote manipulation is emerging as one of the key robotics tasks needed in extreme environments. Several researchers have investigated how to add AI components into shared controllers to improve their reliability. Nonetheless, the impact of novel research approaches in real-world applications can have a very slow in-take. We propose a set of benchmarks and metrics to evaluate how the AI components of remote shared control algorithms can improve the effectiveness of such frameworks for real industrial applications. We also present an empirical evaluation of a simple intelligent share controller against a manually operated manipulator in a tele-operated grasping scenario.
Cross-calibration of Time-of-flight and Colour Cameras
Jun 30, 2014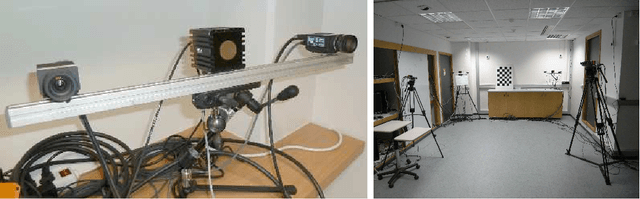
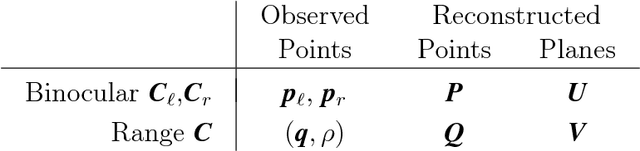
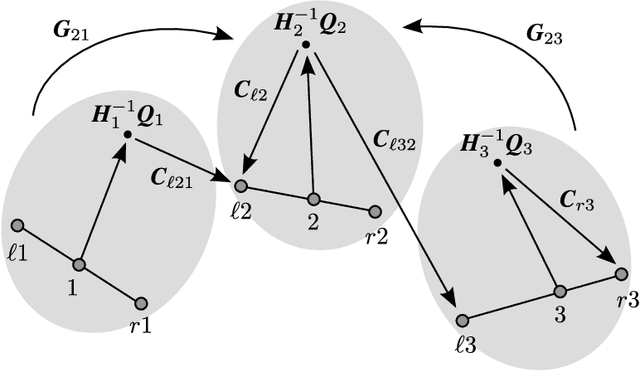
Time-of-flight cameras provide depth information, which is complementary to the photometric appearance of the scene in ordinary images. It is desirable to merge the depth and colour information, in order to obtain a coherent scene representation. However, the individual cameras will have different viewpoints, resolutions and fields of view, which means that they must be mutually calibrated. This paper presents a geometric framework for this multi-view and multi-modal calibration problem. It is shown that three-dimensional projective transformations can be used to align depth and parallax-based representations of the scene, with or without Euclidean reconstruction. A new evaluation procedure is also developed; this allows the reprojection error to be decomposed into calibration and sensor-dependent components. The complete approach is demonstrated on a network of three time-of-flight and six colour cameras. The applications of such a system, to a range of automatic scene-interpretation problems, are discussed.
Automatic Detection of Calibration Grids in Time-of-Flight Images
Jan 24, 2014



It is convenient to calibrate time-of-flight cameras by established methods, using images of a chequerboard pattern. The low resolution of the amplitude image, however, makes it difficult to detect the board reliably. Heuristic detection methods, based on connected image-components, perform very poorly on this data. An alternative, geometrically-principled method is introduced here, based on the Hough transform. The projection of a chequerboard is represented by two pencils of lines, which are identified as oriented clusters in the gradient-data of the image. A projective Hough transform is applied to each of the two clusters, in axis-aligned coordinates. The range of each transform is properly bounded, because the corresponding gradient vectors are approximately parallel. Each of the two transforms contains a series of collinear peaks; one for every line in the given pencil. This pattern is easily detected, by sweeping a dual line through the transform. The proposed Hough-based method is compared to the standard OpenCV detection routine, by application to several hundred time-of-flight images. It is shown that the new method detects significantly more calibration boards, over a greater variety of poses, without any overall loss of accuracy. This conclusion is based on an analysis of both geometric and photometric error.
* 11 pages, 11 figures, 1 table