 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeComparative analysis of machine learning and numerical modeling for combined heat transfer in Polymethylmethacrylate
Apr 12, 2022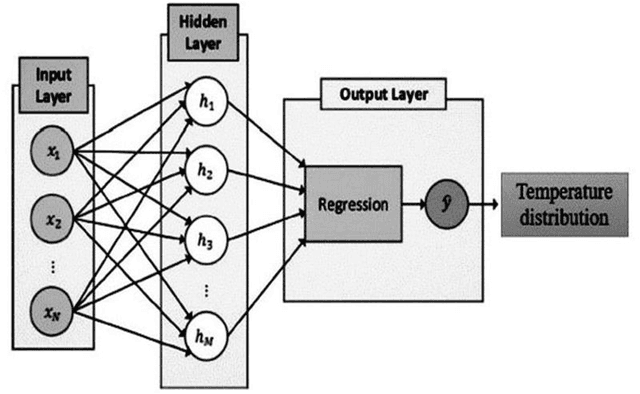
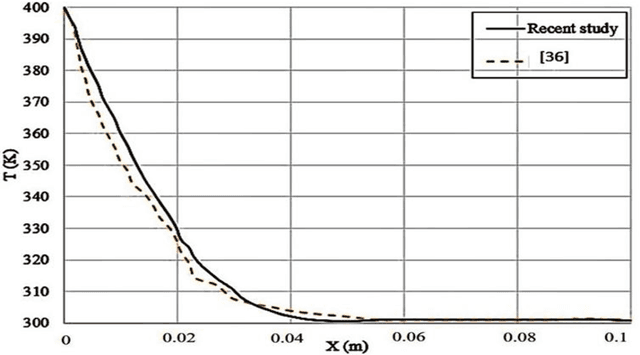
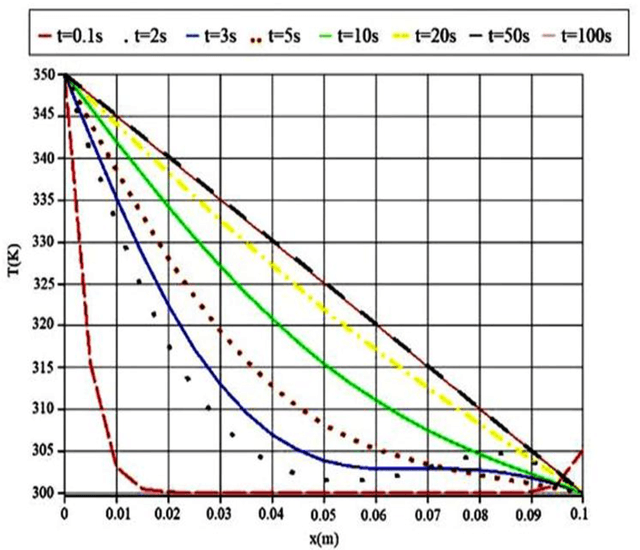
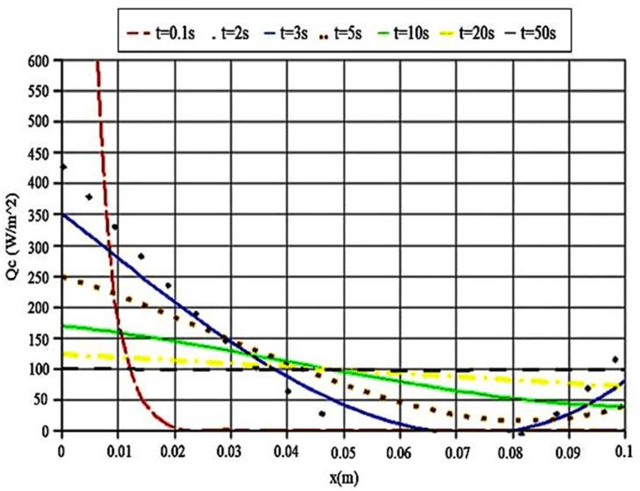
This study compares different methods to predict the simultaneous effects of conductive and radiative heat transfer in a Polymethylmethacrylate (PMMA) sample. PMMA is a kind of polymer utilized in various sensors and actuator devices. One-dimensional combined heat transfer is considered in numerical analysis. Computer implementation was obtained for the numerical solution of governing equation with the implicit finite difference method in the case of discretization. Kirchhoff transformation was used to get data from a non-linear equation of conductive heat transfer by considering monochromatic radiation intensity and temperature conditions applied to the PMMA sample boundaries. For Deep Neural Network (DNN) method, the novel Long Short Term Memory (LSTM) method was introduced to find accurate results in the least processing time than the numerical method. A recent study derived the combined heat transfers and their temperature profiles for the PMMA sample. Furthermore, the transient temperature profile is validated by another study. A comparison proves a perfect agreement. It shows the temperature gradient in the primary positions that makes a spectral amount of conductive heat transfer from a PMMA sample. It is more straightforward when they are compared with the novel DNN method. Results demonstrate that this artificial intelligence method is accurate and fast in predicting problems. By analyzing the results from the numerical solution it can be understood that the conductive and radiative heat flux is similar in the case of gradient behavior, but it is also twice in its amount approximately. Hence, total heat flux has a constant value in an approximated steady state condition. In addition to analyzing their composition, ROC curve and confusion matrix were implemented to evaluate the algorithm performance.
SURENA IV: Towards A Cost-effective Full-size Humanoid Robot for Real-world Scenarios
Aug 30, 2021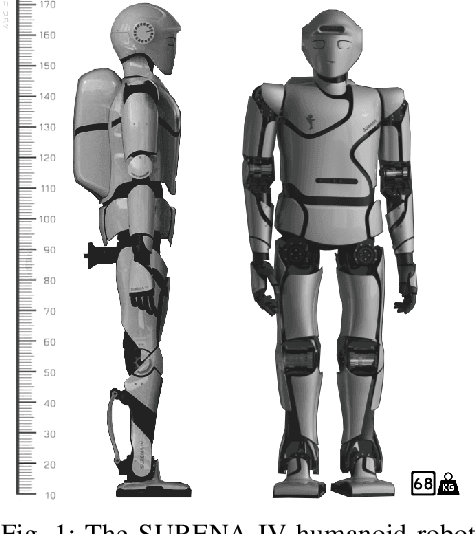
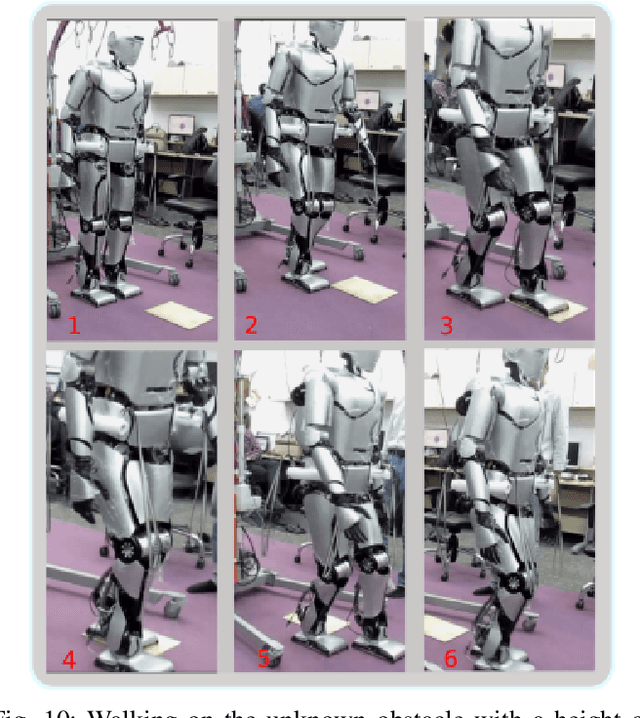

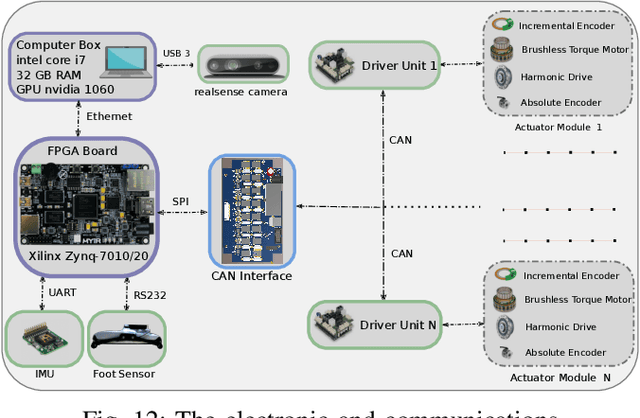
This paper describes the hardware, software framework, and experimental testing of SURENA IV humanoid robotics platform. SURENA IV has 43 degrees of freedom (DoFs), including seven DoFs for each arm, six DoFs for each hand, and six DoFs for each leg, with a height of 170 cm and a mass of 68 kg and morphological and mass properties similar to an average adult human. SURENA IV aims to realize a cost-effective and anthropomorphic humanoid robot for real-world scenarios. In this way, we demonstrate a locomotion framework based on a novel and inexpensive predictive foot sensor that enables walking with 7cm foot position error because of accumulative error of links and connections' deflection(that has been manufactured by the tools which are available in the Universities). Thanks to this sensor, the robot can walk on unknown obstacles without any force feedback, by online adaptation of foot height and orientation. Moreover, the arm and hand of the robot have been designed to grasp the objects with different stiffness and geometries that enable the robot to do drilling, visual servoing of a moving object, and writing his name on the white-board.