 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeATLASv2: LLM-Guided Adaptive Landmark Acquisition and Navigation on the Edge
Apr 15, 2025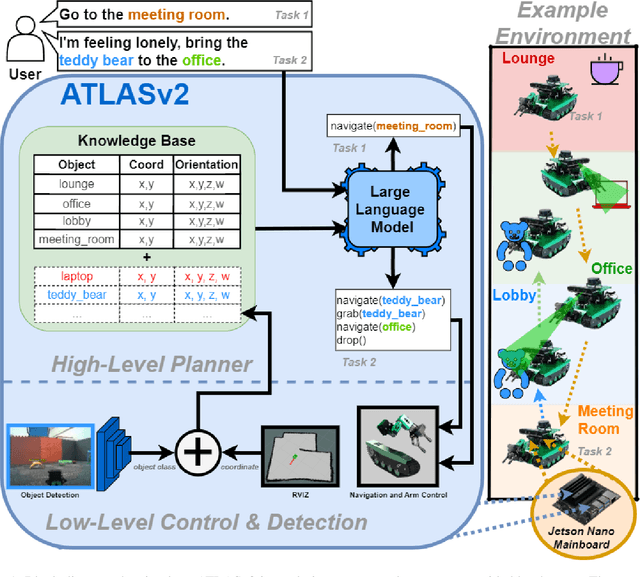
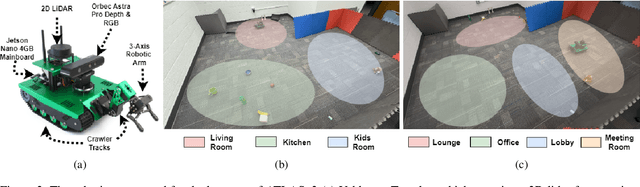
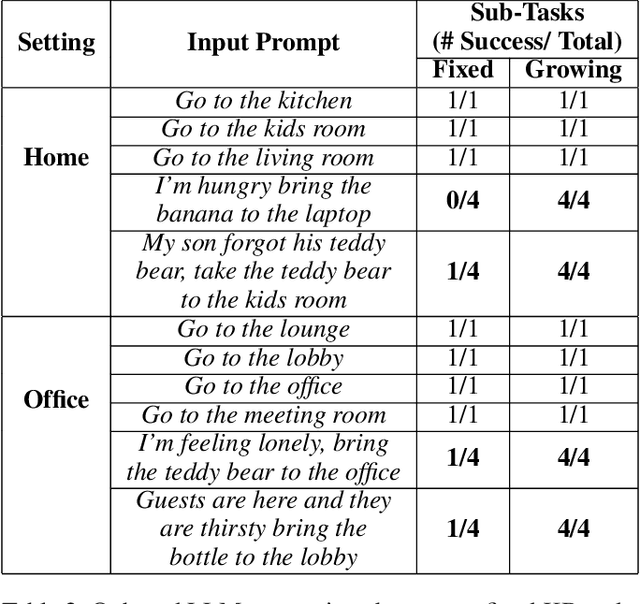
Autonomous systems deployed on edge devices face significant challenges, including resource constraints, real-time processing demands, and adapting to dynamic environments. This work introduces ATLASv2, a novel system that integrates a fine-tuned TinyLLM, real-time object detection, and efficient path planning to enable hierarchical, multi-task navigation and manipulation all on the edge device, Jetson Nano. ATLASv2 dynamically expands its navigable landmarks by detecting and localizing objects in the environment which are saved to its internal knowledge base to be used for future task execution. We evaluate ATLASv2 in real-world environments, including a handcrafted home and office setting constructed with diverse objects and landmarks. Results show that ATLASv2 effectively interprets natural language instructions, decomposes them into low-level actions, and executes tasks with high success rates. By leveraging generative AI in a fully on-board framework, ATLASv2 achieves optimized resource utilization with minimal prompting latency and power consumption, bridging the gap between simulated environments and real-world applications.
A Reliable and Low Latency Synchronizing Middleware for Co-simulation of a Heterogeneous Multi-Robot Systems
Nov 10, 2022Search and rescue, wildfire monitoring, and flood/hurricane impact assessment are mission-critical services for recent IoT networks. Communication synchronization, dependability, and minimal communication jitter are major simulation and system issues for the time-based physics-based ROS simulator, event-based network-based wireless simulator, and complex dynamics of mobile and heterogeneous IoT devices deployed in actual environments. Simulating a heterogeneous multi-robot system before deployment is difficult due to synchronizing physics (robotics) and network simulators. Due to its master-based architecture, most TCP/IP-based synchronization middlewares use ROS1. A real-time ROS2 architecture with masterless packet discovery synchronizes robotics and wireless network simulations. A velocity-aware Transmission Control Protocol (TCP) technique for ground and aerial robots using Data Distribution Service (DDS) publish-subscribe transport minimizes packet loss, synchronization, transmission, and communication jitters. Gazebo and NS-3 simulate and test. Simulator-agnostic middleware. LOS/NLOS and TCP/UDP protocols tested our ROS2-based synchronization middleware for packet loss probability and average latency. A thorough ablation research replaced NS-3 with EMANE, a real-time wireless network simulator, and masterless ROS2 with master-based ROS1. Finally, we tested network synchronization and jitter using one aerial drone (Duckiedrone) and two ground vehicles (TurtleBot3 Burger) on different terrains in masterless (ROS2) and master-enabled (ROS1) clusters. Our middleware shows that a large-scale IoT infrastructure with a diverse set of stationary and robotic devices can achieve low-latency communications (12% and 11% reduction in simulation and real) while meeting mission-critical application reliability (10% and 15% packet loss reduction) and high-fidelity requirements.