 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRAFT: Robust Augmentation of FeaTures for Image Segmentation
May 07, 2025Image segmentation is a powerful computer vision technique for scene understanding. However, real-world deployment is stymied by the need for high-quality, meticulously labeled datasets. Synthetic data provides high-quality labels while reducing the need for manual data collection and annotation. However, deep neural networks trained on synthetic data often face the Syn2Real problem, leading to poor performance in real-world deployments. To mitigate the aforementioned gap in image segmentation, we propose RAFT, a novel framework for adapting image segmentation models using minimal labeled real-world data through data and feature augmentations, as well as active learning. To validate RAFT, we perform experiments on the synthetic-to-real "SYNTHIA->Cityscapes" and "GTAV->Cityscapes" benchmarks. We managed to surpass the previous state of the art, HALO. SYNTHIA->Cityscapes experiences an improvement in mIoU* upon domain adaptation of 2.1%/79.9%, and GTAV->Cityscapes experiences a 0.4%/78.2% improvement in mIoU. Furthermore, we test our approach on the real-to-real benchmark of "Cityscapes->ACDC", and again surpass HALO, with a gain in mIoU upon adaptation of 1.3%/73.2%. Finally, we examine the effect of the allocated annotation budget and various components of RAFT upon the final transfer mIoU.
ATLASv2: LLM-Guided Adaptive Landmark Acquisition and Navigation on the Edge
Apr 15, 2025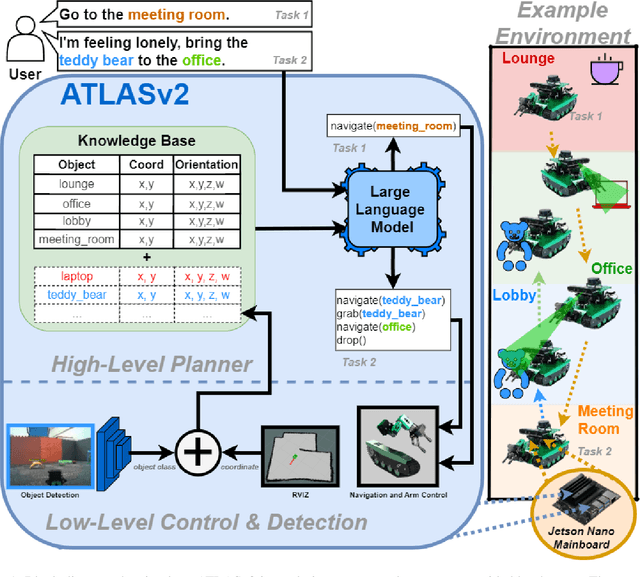
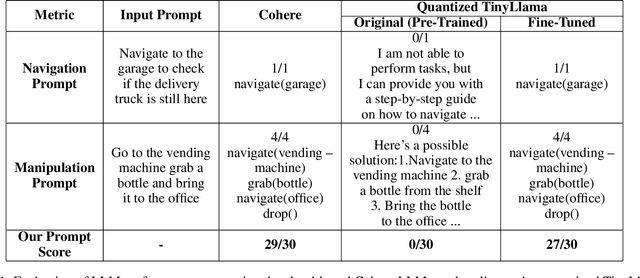
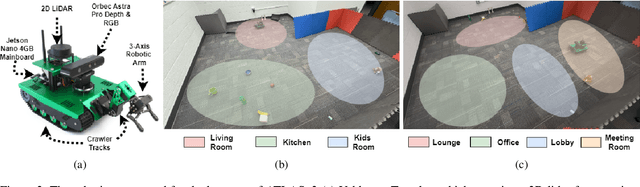
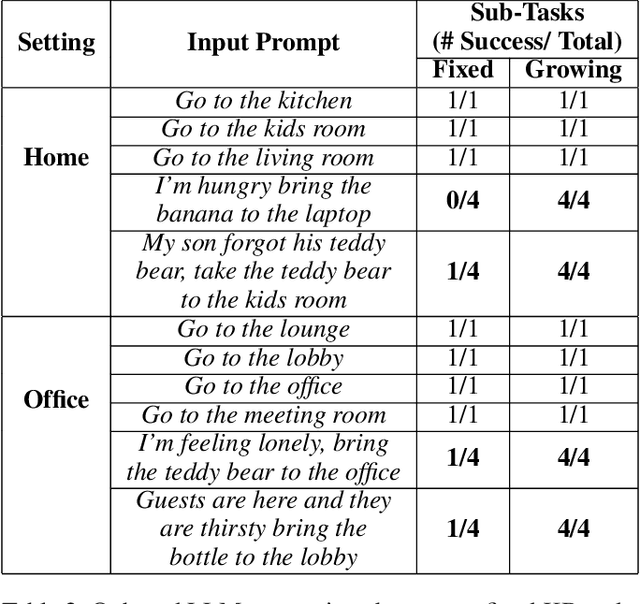
Autonomous systems deployed on edge devices face significant challenges, including resource constraints, real-time processing demands, and adapting to dynamic environments. This work introduces ATLASv2, a novel system that integrates a fine-tuned TinyLLM, real-time object detection, and efficient path planning to enable hierarchical, multi-task navigation and manipulation all on the edge device, Jetson Nano. ATLASv2 dynamically expands its navigable landmarks by detecting and localizing objects in the environment which are saved to its internal knowledge base to be used for future task execution. We evaluate ATLASv2 in real-world environments, including a handcrafted home and office setting constructed with diverse objects and landmarks. Results show that ATLASv2 effectively interprets natural language instructions, decomposes them into low-level actions, and executes tasks with high success rates. By leveraging generative AI in a fully on-board framework, ATLASv2 achieves optimized resource utilization with minimal prompting latency and power consumption, bridging the gap between simulated environments and real-world applications.