 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTen Problems in Geobotics
Aug 26, 2024Robots sense, move and act in the physical world. It is therefore natural that algorithmic problems in robotics and automation have a geometric component, often central to the problem. Below we review ten challenging problems at the intersection of robotics and computational geometry -- let's call this intersection Geobotics. What is common to most of these problems is that the prevalent algorithmic techniques used in robotics do not seem suitable for solving them, or at least do not suggest quality guarantees for the solution. Solving some of them, even partially, can shed light on less well-understood aspects of computation in robotics.
Coordination of Multiple Robots along Given Paths with Bounded Junction Complexity
Mar 01, 2023We study a fundamental NP-hard motion coordination problem for multi-robot/multi-agent systems: We are given a graph $G$ and set of agents, where each agent has a given directed path in $G$. Each agent is initially located on the first vertex of its path. At each time step an agent can move to the next vertex on its path, provided that the vertex is not occupied by another agent. The goal is to find a sequence of such moves along the given paths so that each reaches its target, or to report that no such sequence exists. The problem models guidepath-based transport systems, which is a pertinent abstraction for traffic in a variety of contemporary applications, ranging from train networks or Automated Guided Vehicles (AGVs) in factories, through computer game animations, to qubit transport in quantum computing. It also arises as a sub-problem in the more general multi-robot motion-planning problem. We provide a fine-grained tractability analysis of the problem by considering new assumptions and identifying minimal values of key parameters for which the problem remains NP-hard. Our analysis identifies a critical parameter called vertex multiplicity (VM), defined as the maximum number of paths passing through the same vertex. We show that a prevalent variant of the problem, which is equivalent to Sequential Resource Allocation (concerning deadlock prevention for concurrent processes), is NP-hard even when VM is 3. On the positive side, for VM $\le$ 2 we give an efficient algorithm that iteratively resolves cycles of blocking relations among agents. We also present a variant that is NP-hard when the VM is 2 even when $G$ is a 2D grid and each path lies in a single grid row or column. By studying highly distilled yet NP-hard variants, we deepen the understanding of what makes the problem intractable and thereby guide the search for efficient solutions under practical assumptions.
Covering Polygons is Even Harder
Jun 04, 2021


In the MINIMUM CONVEX COVER (MCC) problem, we are given a simple polygon $\mathcal P$ and an integer $k$, and the question is if there exist $k$ convex polygons whose union is $\mathcal P$. It is known that MCC is $\mathsf{NP}$-hard [Culberson & Reckhow: Covering polygons is hard, FOCS 1988/Journal of Algorithms 1994] and in $\exists\mathbb{R}$ [O'Rourke: The complexity of computing minimum convex covers for polygons, Allerton 1982]. We prove that MCC is $\exists\mathbb{R}$-hard, and the problem is thus $\exists\mathbb{R}$-complete. In other words, the problem is equivalent to deciding whether a system of polynomial equations and inequalities with integer coefficients has a real solution. If a cover for our constructed polygon exists, then so does a cover consisting entirely of triangles. As a byproduct, we therefore also establish that it is $\exists\mathbb{R}$-complete to decide whether $k$ triangles cover a given polygon. The issue that it was not known if finding a minimum cover is in $\mathsf{NP}$ has repeatedly been raised in the literature, and it was mentioned as a "long-standing open question" already in 2001 [Eidenbenz & Widmayer: An approximation algorithm for minimum convex cover with logarithmic performance guarantee, ESA 2001/SIAM Journal on Computing 2003]. We prove that assuming the widespread belief that $\mathsf{NP}\neq\exists\mathbb{R}$, the problem is not in $\mathsf{NP}$. An implication of the result is that many natural approaches to finding small covers are bound to give suboptimal solutions in some cases, since irrational coordinates of arbitrarily high algebraic degree can be needed for the corners of the pieces in an optimal solution.
Training Neural Networks is ER-complete
Feb 19, 2021
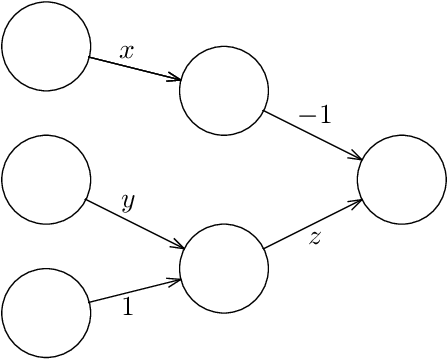
Given a neural network, training data, and a threshold, it was known that it is NP-hard to find weights for the neural network such that the total error is below the threshold. We determine the algorithmic complexity of this fundamental problem precisely, by showing that it is ER-complete. This means that the problem is equivalent, up to polynomial-time reductions, to deciding whether a system of polynomial equations and inequalities with integer coefficients and real unknowns has a solution. If, as widely expected, ER is strictly larger than NP, our work implies that the problem of training neural networks is not even in NP.
Escaping an Infinitude of Lions
Dec 21, 2020We consider the following game played in the Euclidean plane: There is any countable set of unit speed lions and one fast man who can run with speed $1+\varepsilon$ for some value $\varepsilon>0$. Can the man survive? We answer the question in the affirmative for any $\varepsilon>0$.
* Published in American Mathematical Monthly, but references [5] and [10] are new. For a preliminary version, see arXiv:1703.03687