 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLearning long term climate-resilient transport adaptation pathways under direct and indirect flood impacts using reinforcement learning
Jan 26, 2026Climate change is expected to intensify rainfall and other hazards, increasing disruptions in urban transportation systems. Designing effective adaptation strategies is challenging due to the long-term, sequential nature of infrastructure investments, deep uncertainty, and complex cross-sector interactions. We propose a generic decision-support framework that couples an integrated assessment model (IAM) with reinforcement learning (RL) to learn adaptive, multi-decade investment pathways under uncertainty. The framework combines long-term climate projections (e.g., IPCC scenario pathways) with models that map projected extreme-weather drivers (e.g. rain) into hazard likelihoods (e.g. flooding), propagate hazards into urban infrastructure impacts (e.g. transport disruption), and value direct and indirect consequences for service performance and societal costs. Embedded in a reinforcement-learning loop, it learns adaptive climate adaptation policies that trade off investment and maintenance expenditures against avoided impacts. In collaboration with Copenhagen Municipality, we demonstrate the approach on pluvial flooding in the inner city for the horizon of 2024 to 2100. The learned strategies yield coordinated spatial-temporal pathways and improved robustness relative to conventional optimization baselines, namely inaction and random action, illustrating the framework's transferability to other hazards and cities.
Domain-Adapted Pre-trained Language Models for Implicit Information Extraction in Crash Narratives
Oct 10, 2025



Free-text crash narratives recorded in real-world crash databases have been shown to play a significant role in improving traffic safety. However, large-scale analyses remain difficult to implement as there are no documented tools that can batch process the unstructured, non standardized text content written by various authors with diverse experience and attention to detail. In recent years, Transformer-based pre-trained language models (PLMs), such as Bidirectional Encoder Representations from Transformers (BERT) and large language models (LLMs), have demonstrated strong capabilities across various natural language processing tasks. These models can extract explicit facts from crash narratives, but their performance declines on inference-heavy tasks in, for example, Crash Type identification, which can involve nearly 100 categories. Moreover, relying on closed LLMs through external APIs raises privacy concerns for sensitive crash data. Additionally, these black-box tools often underperform due to limited domain knowledge. Motivated by these challenges, we study whether compact open-source PLMs can support reasoning-intensive extraction from crash narratives. We target two challenging objectives: 1) identifying the Manner of Collision for a crash, and 2) Crash Type for each vehicle involved in the crash event from real-world crash narratives. To bridge domain gaps, we apply fine-tuning techniques to inject task-specific knowledge to LLMs with Low-Rank Adaption (LoRA) and BERT. Experiments on the authoritative real-world dataset Crash Investigation Sampling System (CISS) demonstrate that our fine-tuned compact models outperform strong closed LLMs, such as GPT-4o, while requiring only minimal training resources. Further analysis reveals that the fine-tuned PLMs can capture richer narrative details and even correct some mislabeled annotations in the dataset.
Plugging Schema Graph into Multi-Table QA: A Human-Guided Framework for Reducing LLM Reliance
Jun 04, 2025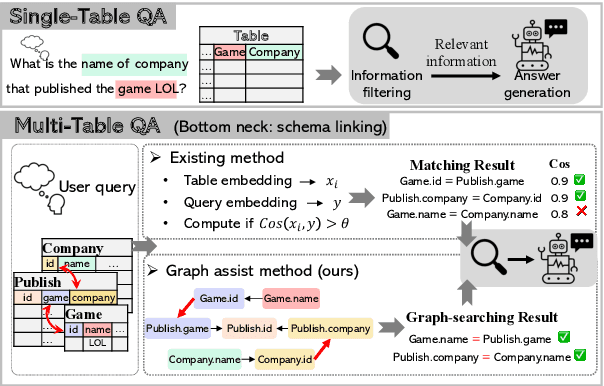
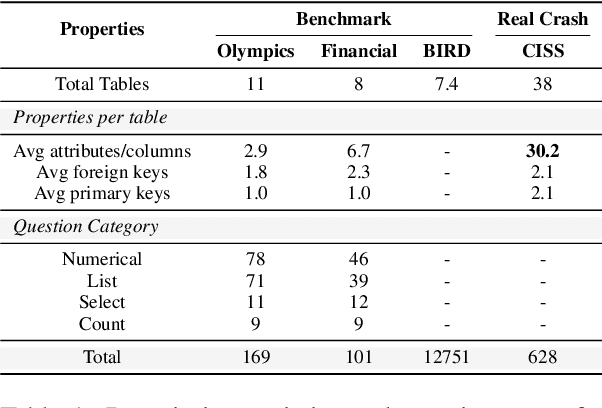
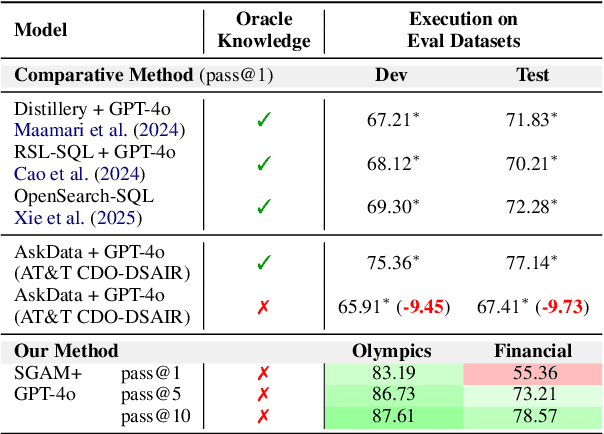
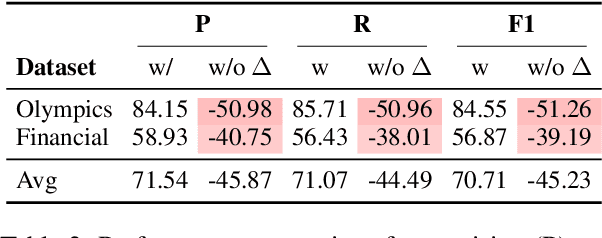
Large language models (LLMs) have shown promise in table Question Answering (Table QA). However, extending these capabilities to multi-table QA remains challenging due to unreliable schema linking across complex tables. Existing methods based on semantic similarity work well only on simplified hand-crafted datasets and struggle to handle complex, real-world scenarios with numerous and diverse columns. To address this, we propose a graph-based framework that leverages human-curated relational knowledge to explicitly encode schema links and join paths. Given a natural language query, our method searches this graph to construct interpretable reasoning chains, aided by pruning and sub-path merging strategies to enhance efficiency and coherence. Experiments on both standard benchmarks and a realistic, large-scale dataset demonstrate the effectiveness of our approach. To our knowledge, this is the first multi-table QA system applied to truly complex industrial tabular data.
Using Reinforcement Learning to Integrate Subjective Wellbeing into Climate Adaptation Decision Making
Apr 14, 2025Subjective wellbeing is a fundamental aspect of human life, influencing life expectancy and economic productivity, among others. Mobility plays a critical role in maintaining wellbeing, yet the increasing frequency and intensity of both nuisance and high-impact floods due to climate change are expected to significantly disrupt access to activities and destinations, thereby affecting overall wellbeing. Addressing climate adaptation presents a complex challenge for policymakers, who must select and implement policies from a broad set of options with varying effects while managing resource constraints and uncertain climate projections. In this work, we propose a multi-modular framework that uses reinforcement learning as a decision-support tool for climate adaptation in Copenhagen, Denmark. Our framework integrates four interconnected components: long-term rainfall projections, flood modeling, transport accessibility, and wellbeing modeling. This approach enables decision-makers to identify spatial and temporal policy interventions that help sustain or enhance subjective wellbeing over time. By modeling climate adaptation as an open-ended system, our framework provides a structured framework for exploring and evaluating adaptation policy pathways. In doing so, it supports policymakers to make informed decisions that maximize wellbeing in the long run.
Which cycling environment appears safer? Learning cycling safety perceptions from pairwise image comparisons
Dec 13, 2024Cycling is critical for cities to transition to more sustainable transport modes. Yet, safety concerns remain a critical deterrent for individuals to cycle. If individuals perceive an environment as unsafe for cycling, it is likely that they will prefer other means of transportation. Yet, capturing and understanding how individuals perceive cycling risk is complex and often slow, with researchers defaulting to traditional surveys and in-loco interviews. In this study, we tackle this problem. We base our approach on using pairwise comparisons of real-world images, repeatedly presenting respondents with pairs of road environments and asking them to select the one they perceive as safer for cycling, if any. Using the collected data, we train a siamese-convolutional neural network using a multi-loss framework that learns from individuals' responses, learns preferences directly from images, and includes ties (often discarded in the literature). Effectively, this model learns to predict human-style perceptions, evaluating which cycling environments are perceived as safer. Our model achieves good results, showcasing this approach has a real-life impact, such as improving interventions' effectiveness. Furthermore, it facilitates the continuous assessment of changing cycling environments, permitting short-term evaluations of measures to enhance perceived cycling safety. Finally, our method can be efficiently deployed in different locations with a growing number of openly available street-view images.
* \copyright 2024 IEEE. Personal use of this material is permitted. Permission from IEEE must be obtained for all other uses, in any current or future media, including reprinting/republishing this material for advertising or promotional purposes, creating new collective works, for resale or redistribution to servers or lists, or reuse of any copyrighted component of this work in other works
Climate Adaptation with Reinforcement Learning: Experiments with Flooding and Transportation in Copenhagen
Sep 27, 2024Due to climate change the frequency and intensity of extreme rainfall events, which contribute to urban flooding, are expected to increase in many places. These floods can damage transport infrastructure and disrupt mobility, highlighting the need for cities to adapt to escalating risks. Reinforcement learning (RL) serves as a powerful tool for uncovering optimal adaptation strategies, determining how and where to deploy adaptation measures effectively, even under significant uncertainty. In this study, we leverage RL to identify the most effective timing and locations for implementing measures, aiming to reduce both direct and indirect impacts of flooding. Our framework integrates climate change projections of future rainfall events and floods, models city-wide motorized trips, and quantifies direct and indirect impacts on infrastructure and mobility. Preliminary results suggest that our RL-based approach can significantly enhance decision-making by prioritizing interventions in specific urban areas and identifying the optimal periods for their implementation.
David and Goliath: An Empirical Evaluation of Attacks and Defenses for QNNs at the Deep Edge
Apr 08, 2024



ML is shifting from the cloud to the edge. Edge computing reduces the surface exposing private data and enables reliable throughput guarantees in real-time applications. Of the panoply of devices deployed at the edge, resource-constrained MCUs, e.g., Arm Cortex-M, are more prevalent, orders of magnitude cheaper, and less power-hungry than application processors or GPUs. Thus, enabling intelligence at the deep edge is the zeitgeist, with researchers focusing on unveiling novel approaches to deploy ANNs on these constrained devices. Quantization is a well-established technique that has proved effective in enabling the deployment of neural networks on MCUs; however, it is still an open question to understand the robustness of QNNs in the face of adversarial examples. To fill this gap, we empirically evaluate the effectiveness of attacks and defenses from (full-precision) ANNs on (constrained) QNNs. Our evaluation includes three QNNs targeting TinyML applications, ten attacks, and six defenses. With this study, we draw a set of interesting findings. First, quantization increases the point distance to the decision boundary and leads the gradient estimated by some attacks to explode or vanish. Second, quantization can act as a noise attenuator or amplifier, depending on the noise magnitude, and causes gradient misalignment. Regarding adversarial defenses, we conclude that input pre-processing defenses show impressive results on small perturbations; however, they fall short as the perturbation increases. At the same time, train-based defenses increase the average point distance to the decision boundary, which holds after quantization. However, we argue that train-based defenses still need to smooth the quantization-shift and gradient misalignment phenomenons to counteract adversarial example transferability to QNNs. All artifacts are open-sourced to enable independent validation of results.
Scoring Cycling Environments Perceived Safety using Pairwise Image Comparisons
Jul 31, 2023Today, many cities seek to transition to more sustainable transportation systems. Cycling is critical in this transition for shorter trips, including first-and-last-mile links to transit. Yet, if individuals perceive cycling as unsafe, they will not cycle and choose other transportation modes. This study presents a novel approach to identifying how the perception of cycling safety can be analyzed and understood and the impact of the built environment and cycling contexts on such perceptions. We base our work on other perception studies and pairwise comparisons, using real-world images to survey respondents. We repeatedly show respondents two road environments and ask them to select the one they perceive as safer for cycling. We compare several methods capable of rating cycling environments from pairwise comparisons and classify cycling environments perceived as safe or unsafe. Urban planning can use this score to improve interventions' effectiveness and improve cycling promotion campaigns. Furthermore, this approach facilitates the continuous assessment of changing cycling environments, allows for a short-term evaluation of measures, and is efficiently deployed in different locations or contexts.
Shifting Capsule Networks from the Cloud to the Deep Edge
Oct 06, 2021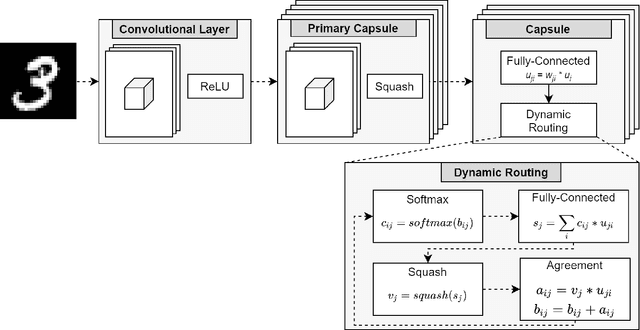
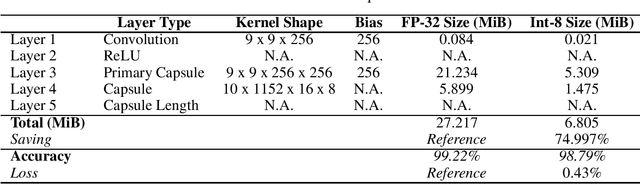
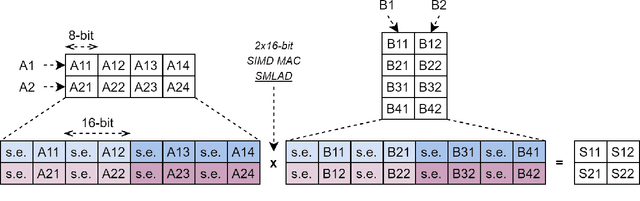

Capsule networks (CapsNets) are an emerging trend in image processing. In contrast to a convolutional neural network, CapsNets are not vulnerable to object deformation, as the relative spatial information of the objects is preserved across the network. However, their complexity is mainly related with the capsule structure and the dynamic routing mechanism, which makes it almost unreasonable to deploy a CapsNet, in its original form, in a resource-constrained device powered by a small microcontroller (MCU). In an era where intelligence is rapidly shifting from the cloud to the edge, this high complexity imposes serious challenges to the adoption of CapsNets at the very edge. To tackle this issue, we present an API for the execution of quantized CapsNets in Cortex-M and RISC-V MCUs. Our software kernels extend the Arm CMSIS-NN and RISC-V PULP-NN, to support capsule operations with 8-bit integers as operands. Along with it, we propose a framework to perform post training quantization of a CapsNet. Results show a reduction in memory footprint of almost 75%, with a maximum accuracy loss of 1%. In terms of throughput, our software kernels for the Arm Cortex-M are, at least, 5.70x faster than a pre-quantized CapsNet running on an NVIDIA GTX 980 Ti graphics card. For RISC-V, the throughout gain increases to 26.28x and 56.91x for a single- and octa-core configuration, respectively.
A Context Aware and Video-Based Risk Descriptor for Cyclists
Apr 24, 2017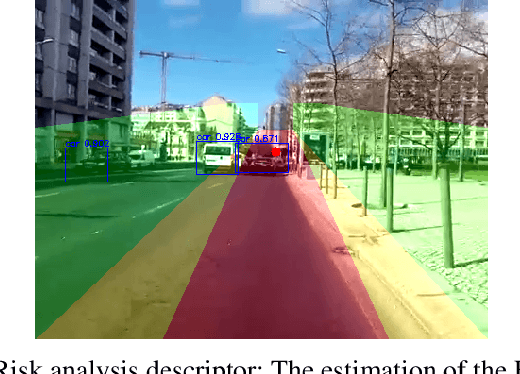
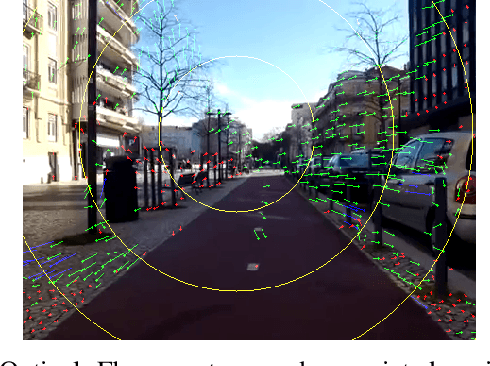

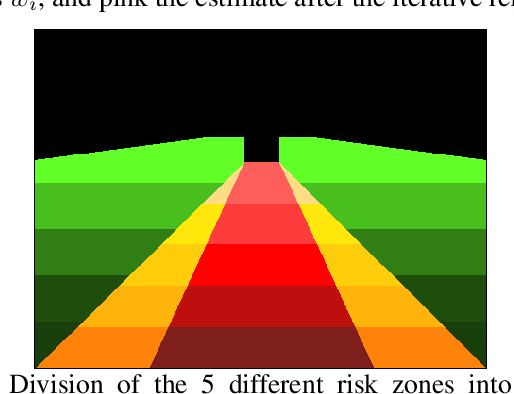
Aiming to reduce pollutant emissions, bicycles are regaining popularity specially in urban areas. However, the number of cyclists' fatalities is not showing the same decreasing trend as the other traffic groups. Hence, monitoring cyclists' data appears as a keystone to foster urban cyclists' safety by helping urban planners to design safer cyclist routes. In this work, we propose a fully image-based framework to assess the rout risk from the cyclist perspective. From smartphone sequences of images, this generic framework is able to automatically identify events considering different risk criteria based on the cyclist's motion and object detection. Moreover, since it is entirely based on images, our method provides context on the situation and is independent from the expertise level of the cyclist. Additionally, we build on an existing platform and introduce several improvements on its mobile app to acquire smartphone sensor data, including video. From the inertial sensor data, we automatically detect the route segments performed by bicycle, applying behavior analysis techniques. We test our methods on real data, attaining very promising results in terms of risk classification, according to two different criteria, and behavior analysis accuracy.