 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeWhich cycling environment appears safer? Learning cycling safety perceptions from pairwise image comparisons
Dec 13, 2024Cycling is critical for cities to transition to more sustainable transport modes. Yet, safety concerns remain a critical deterrent for individuals to cycle. If individuals perceive an environment as unsafe for cycling, it is likely that they will prefer other means of transportation. Yet, capturing and understanding how individuals perceive cycling risk is complex and often slow, with researchers defaulting to traditional surveys and in-loco interviews. In this study, we tackle this problem. We base our approach on using pairwise comparisons of real-world images, repeatedly presenting respondents with pairs of road environments and asking them to select the one they perceive as safer for cycling, if any. Using the collected data, we train a siamese-convolutional neural network using a multi-loss framework that learns from individuals' responses, learns preferences directly from images, and includes ties (often discarded in the literature). Effectively, this model learns to predict human-style perceptions, evaluating which cycling environments are perceived as safer. Our model achieves good results, showcasing this approach has a real-life impact, such as improving interventions' effectiveness. Furthermore, it facilitates the continuous assessment of changing cycling environments, permitting short-term evaluations of measures to enhance perceived cycling safety. Finally, our method can be efficiently deployed in different locations with a growing number of openly available street-view images.
* \copyright 2024 IEEE. Personal use of this material is permitted. Permission from IEEE must be obtained for all other uses, in any current or future media, including reprinting/republishing this material for advertising or promotional purposes, creating new collective works, for resale or redistribution to servers or lists, or reuse of any copyrighted component of this work in other works
Using Unsupervised Learning to Explore Robot-Pedestrian Interactions in Urban Environments
May 20, 2024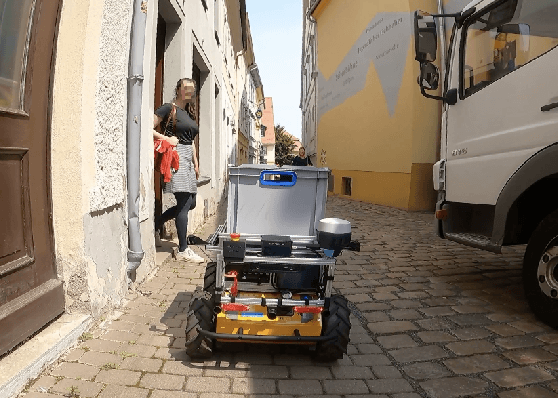
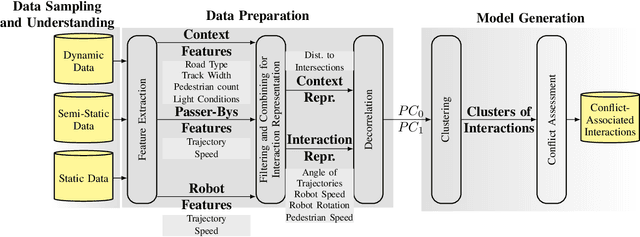
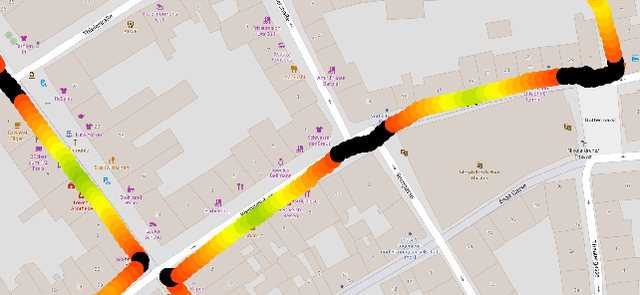
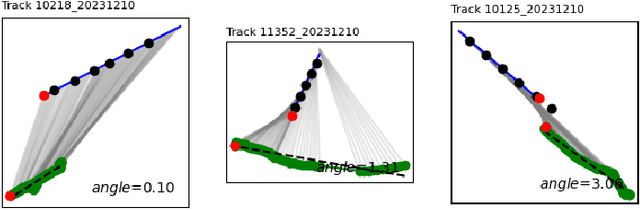
This study identifies a gap in data-driven approaches to robot-centric pedestrian interactions and proposes a corresponding pipeline. The pipeline utilizes unsupervised learning techniques to identify patterns in interaction data of urban environments, specifically focusing on conflict scenarios. Analyzed features include the robot's and pedestrian's speed and contextual parameters such as proximity to intersections. They are extracted and reduced in dimensionality using Principal Component Analysis (PCA). Finally, K-means clustering is employed to uncover underlying patterns in the interaction data. A use case application of the pipeline is presented, utilizing real-world robot mission data from a mid-sized German city. The results indicate the need for enriching interaction representations with contextual information to enable fine-grained analysis and reasoning. Nevertheless, they also highlight the need for expanding the data set and incorporating additional contextual factors to enhance the robots situational awareness and interaction quality.
Scoring Cycling Environments Perceived Safety using Pairwise Image Comparisons
Jul 31, 2023Today, many cities seek to transition to more sustainable transportation systems. Cycling is critical in this transition for shorter trips, including first-and-last-mile links to transit. Yet, if individuals perceive cycling as unsafe, they will not cycle and choose other transportation modes. This study presents a novel approach to identifying how the perception of cycling safety can be analyzed and understood and the impact of the built environment and cycling contexts on such perceptions. We base our work on other perception studies and pairwise comparisons, using real-world images to survey respondents. We repeatedly show respondents two road environments and ask them to select the one they perceive as safer for cycling. We compare several methods capable of rating cycling environments from pairwise comparisons and classify cycling environments perceived as safe or unsafe. Urban planning can use this score to improve interventions' effectiveness and improve cycling promotion campaigns. Furthermore, this approach facilitates the continuous assessment of changing cycling environments, allows for a short-term evaluation of measures, and is efficiently deployed in different locations or contexts.
Detecting motorcycle helmet use with deep learning
Oct 29, 2019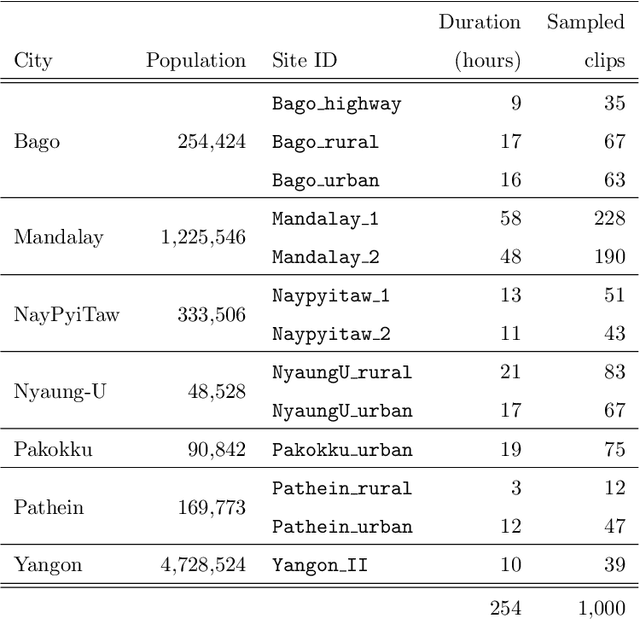
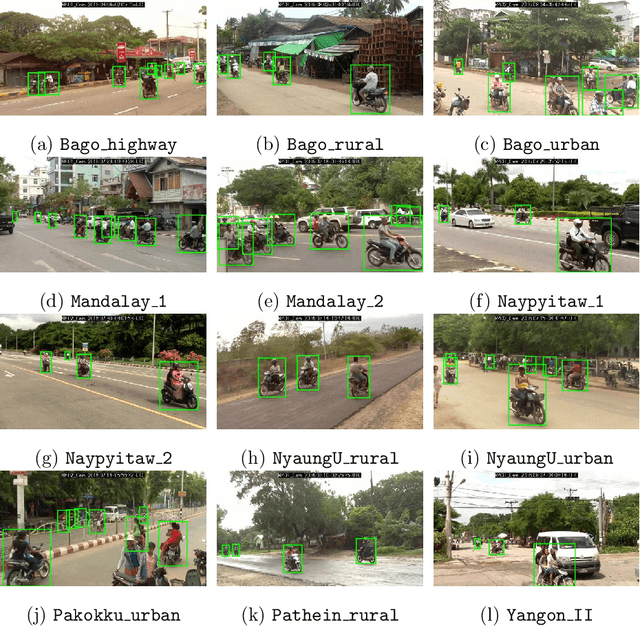
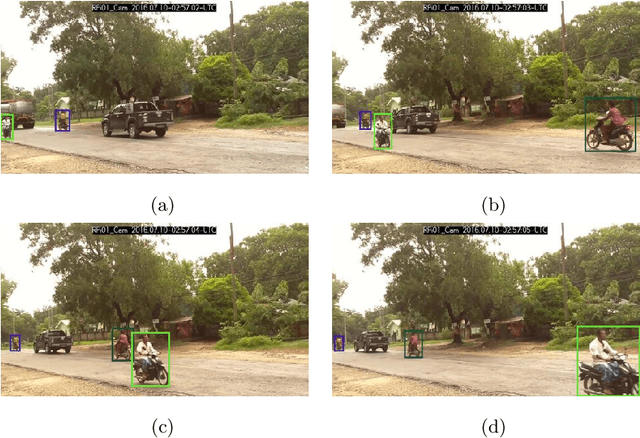
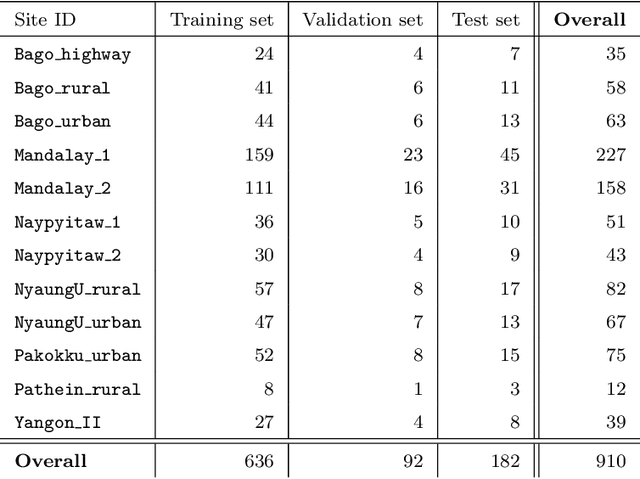
The continuous motorization of traffic has led to a sustained increase in the global number of road related fatalities and injuries. To counter this, governments are focusing on enforcing safe and law-abiding behavior in traffic. However, especially in developing countries where the motorcycle is the main form of transportation, there is a lack of comprehensive data on the safety-critical behavioral metric of motorcycle helmet use. This lack of data prohibits targeted enforcement and education campaigns which are crucial for injury prevention. Hence, we have developed an algorithm for the automated registration of motorcycle helmet usage from video data, using a deep learning approach. Based on 91,000 annotated frames of video data, collected at multiple observation sites in 7 cities across the country of Myanmar, we trained our algorithm to detect active motorcycles, the number and position of riders on the motorcycle, as well as their helmet use. An analysis of the algorithm's accuracy on an annotated test data set, and a comparison to available human-registered helmet use data reveals a high accuracy of our approach. Our algorithm registers motorcycle helmet use rates with an accuracy of -4.4% and +2.1% in comparison to a human observer, with minimal training for individual observation sites. Without observation site specific training, the accuracy of helmet use detection decreases slightly, depending on a number of factors. Our approach can be implemented in existing roadside traffic surveillance infrastructure and can facilitate targeted data-driven injury prevention campaigns with real-time speed. Implications of the proposed method, as well as measures that can further improve detection accuracy are discussed.