 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeUsing Unsupervised Learning to Explore Robot-Pedestrian Interactions in Urban Environments
May 20, 2024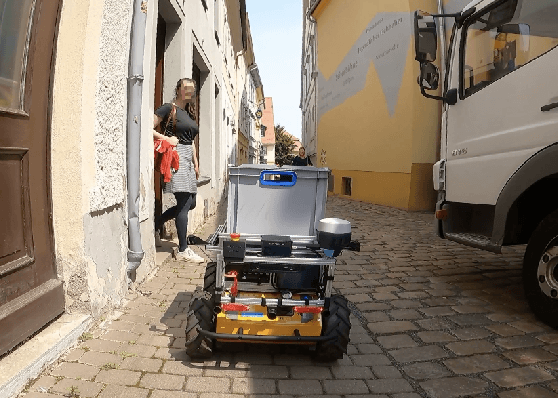
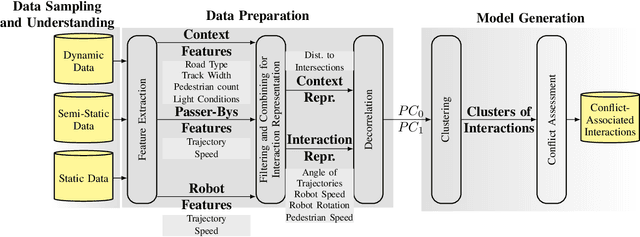
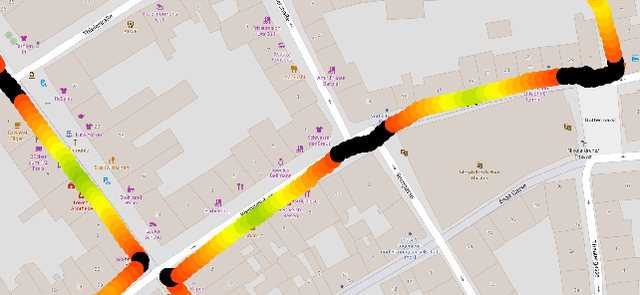
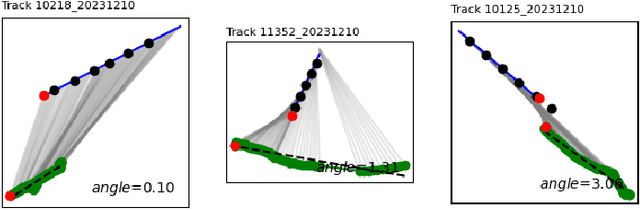
This study identifies a gap in data-driven approaches to robot-centric pedestrian interactions and proposes a corresponding pipeline. The pipeline utilizes unsupervised learning techniques to identify patterns in interaction data of urban environments, specifically focusing on conflict scenarios. Analyzed features include the robot's and pedestrian's speed and contextual parameters such as proximity to intersections. They are extracted and reduced in dimensionality using Principal Component Analysis (PCA). Finally, K-means clustering is employed to uncover underlying patterns in the interaction data. A use case application of the pipeline is presented, utilizing real-world robot mission data from a mid-sized German city. The results indicate the need for enriching interaction representations with contextual information to enable fine-grained analysis and reasoning. Nevertheless, they also highlight the need for expanding the data set and incorporating additional contextual factors to enhance the robots situational awareness and interaction quality.