 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeZoomTouch: Multi-User Remote Robot Control in Zoom by DNN-based Gesture Recognition
Nov 07, 2020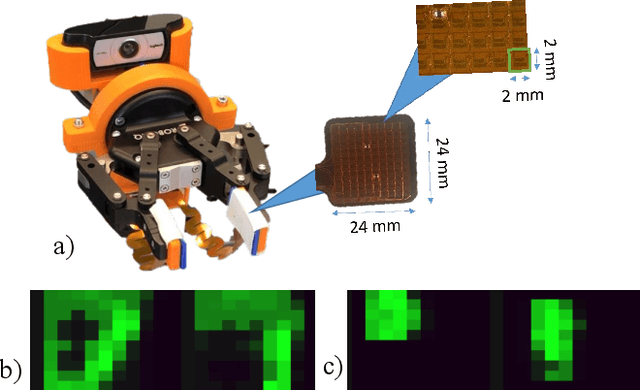
We present ZoomTouch - a breakthrough technology for multi-user control of robot from Zoom in real-time by DNN-based gesture recognition. The users from digital world can have a video conferencing and manipulate the robot to make the dexterous manipulations with tangible objects. As the scenario, we proposed the remote COVID-19 test Laboratory to considerably reduce the time to receive the data and substitute medical assistant working in protective gear in close proximity with infected cells. The proposed technology suggests a new type of reality, where multi-users can jointly interact with remote object, e.g. make a new building design, joint cooking in robotic kitchen, etc, and discuss/modify the results at the same time.
MaskBot: Real-time Robotic Projection Mapping with Head Motion Tracking
Nov 07, 2020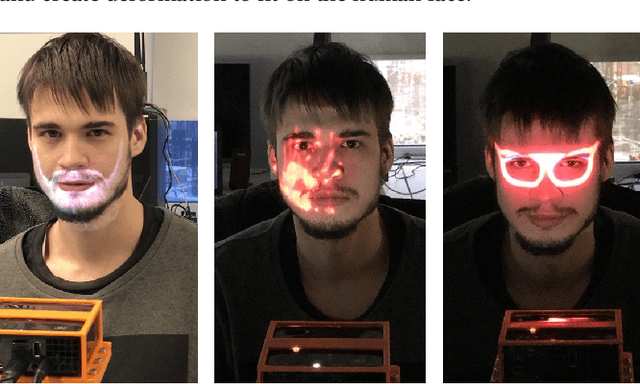
The projection mapping systems on the human face is limited by the latency and the movement of the users. The area of the projection is restricted by the position of the projectors and the cameras. We are introducing MaskBot, a real-time projection mapping system operated by a 6 Degrees of Freedom (DoF) collaborative robot. The collaborative robot locates the projector and camera in normal position to the face of the user to increase the projection area and to reduce the latency of the system. A webcam is used to detect the face and to sense the robot-user distance to modify the projection size and orientation. MaskBot projects different images on the face of the user, such as face modifications, make-up, and logos. In contrast to the existing methods, the presented system is the first that introduces a robotic projection mapping. One of the prospective applications is to acquire a dataset of adversarial images to challenge face detection DNN systems, such as Face ID.