 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeNMR: Neural Manifold Representation for Autonomous Driving
May 11, 2022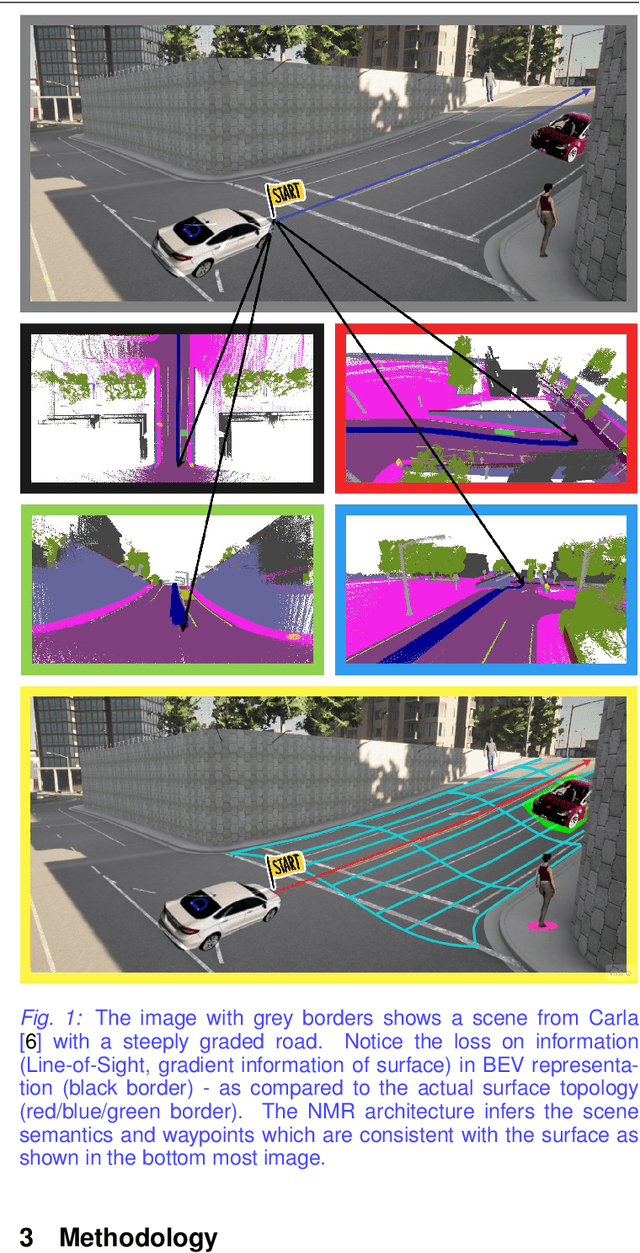
Autonomous driving requires efficient reasoning about the Spatio-temporal nature of the semantics of the scene. Recent approaches have successfully amalgamated the traditional modular architecture of an autonomous driving stack comprising perception, prediction, and planning in an end-to-end trainable system. Such a system calls for a shared latent space embedding with interpretable intermediate trainable projected representation. One such successfully deployed representation is the Bird's-Eye View(BEV) representation of the scene in ego-frame. However, a fundamental assumption for an undistorted BEV is the local coplanarity of the world around the ego-vehicle. This assumption is highly restrictive, as roads, in general, do have gradients. The resulting distortions make path planning inefficient and incorrect. To overcome this limitation, we propose Neural Manifold Representation (NMR), a representation for the task of autonomous driving that learns to infer semantics and predict way-points on a manifold over a finite horizon, centered on the ego-vehicle. We do this using an iterative attention mechanism applied on a latent high dimensional embedding of surround monocular images and partial ego-vehicle state. This representation helps generate motion and behavior plans consistent with and cognizant of the surface geometry. We propose a sampling algorithm based on edge-adaptive coverage loss of BEV occupancy grid and associated guidance flow field to generate the surface manifold while incurring minimal computational overhead. We aim to test the efficacy of our approach on CARLA and SYNTHIA-SF.
Overview of Guidance, Navigation and Control System of the TeamIndus lunar lander
Jul 25, 2019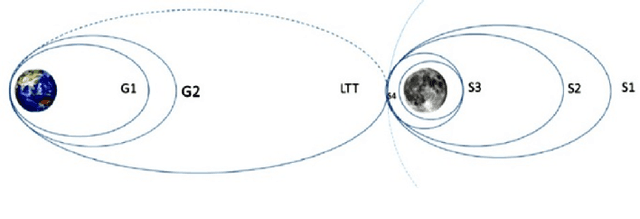
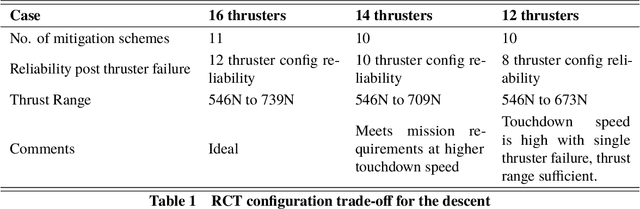
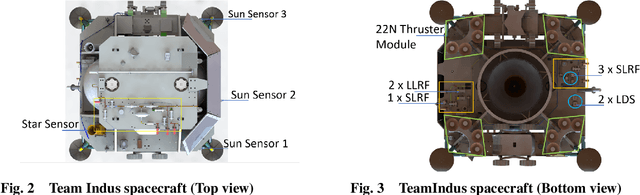
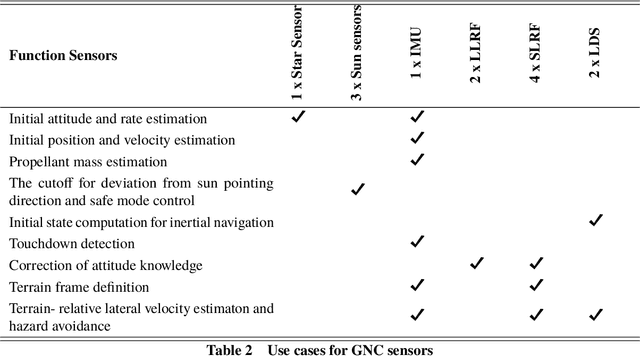
TeamIndus' lunar logistics vision includes multiple lunar missions to meet requirements of science, commercial and efforts towards global exploration. The first mission is slated for launch in 2020. The prime objective is to demonstrate autonomous precision lunar landing, and Surface Exploration Rover to collect data on the vicinity of the landing site. TeamIndus has developed various technologies towards lowering the access barrier to the lunar surface. This paper shall provide an overview of design of lander GNC system. The design of the GNC system has been described after concluding studies on sensor and actuator configurations. Frugal design approach is followed in the selection of GNC hardware. The paper describes the constraints for the orbital maneuvers and the lunar descent strategy. Various aspects of the GNC design of autonomous lunar descent maneuver: timeline of events, guidance, inertial and optical terrain-relative navigation schemes are described. The GNC software description focuses on system architecture, modes of operation, and core elements of the GNC software. The GNC algorithms have been tested using Monte-Carlo simulations and Processor-in-Loop runs. The paper concludes with a summary of key risk-mitigation studies for soft landing.