 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOverview of Guidance, Navigation and Control System of the TeamIndus lunar lander
Jul 25, 2019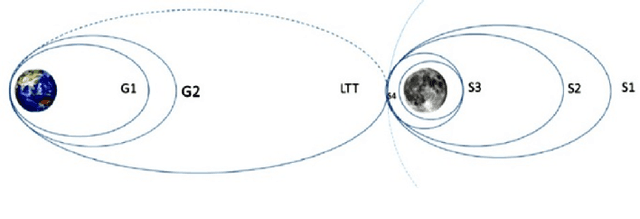
TeamIndus' lunar logistics vision includes multiple lunar missions to meet requirements of science, commercial and efforts towards global exploration. The first mission is slated for launch in 2020. The prime objective is to demonstrate autonomous precision lunar landing, and Surface Exploration Rover to collect data on the vicinity of the landing site. TeamIndus has developed various technologies towards lowering the access barrier to the lunar surface. This paper shall provide an overview of design of lander GNC system. The design of the GNC system has been described after concluding studies on sensor and actuator configurations. Frugal design approach is followed in the selection of GNC hardware. The paper describes the constraints for the orbital maneuvers and the lunar descent strategy. Various aspects of the GNC design of autonomous lunar descent maneuver: timeline of events, guidance, inertial and optical terrain-relative navigation schemes are described. The GNC software description focuses on system architecture, modes of operation, and core elements of the GNC software. The GNC algorithms have been tested using Monte-Carlo simulations and Processor-in-Loop runs. The paper concludes with a summary of key risk-mitigation studies for soft landing.