 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeContinuous Monitoring for Road Flooding With Satellite Onboard Computing For Navigation for OrbitalAI Φsat-2 challenge
May 05, 2024



Continuous monitoring for road flooding could be achieved through onboard computing of satellite imagery to generate near real-time insights made available to generate dynamic information for maps used for navigation. Given the existing computing hardware like the one considered for the PhiSat-2 mission, the paper describes the feasibility of running the road flooding detection. The simulated onboard imagery dataset development and its annotation process for the OrbitalAI {\Phi}sat-2 challenge is described. The flooding events in the city of Bengaluru, India were considered for this challenge. This is followed by the model architecture selection, training, optimization and accuracy results for the model. The results indicate that it is possible to build low size, high accuracy models for the road flooding use case.
GTOC X: Karmarkar's Gang's Approach and Results
Oct 31, 2020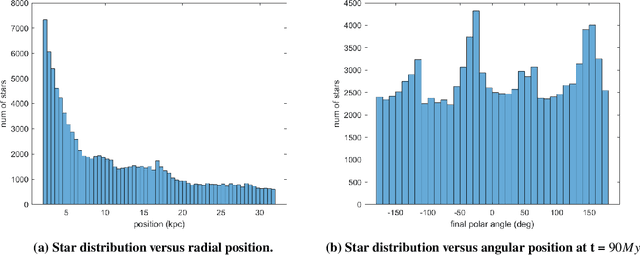

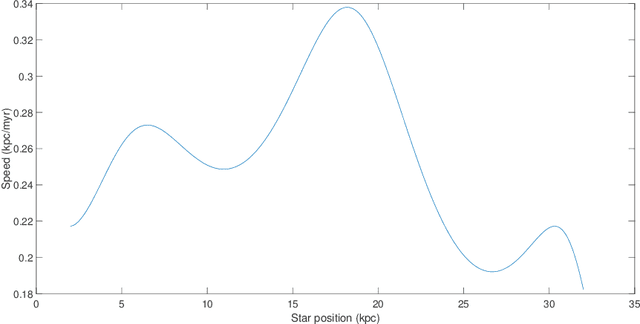
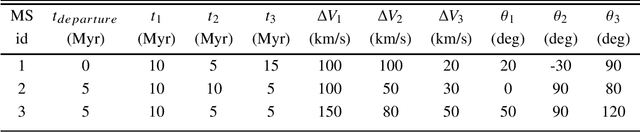
This paper describes the methods used and the results obtained by team Karmarkar's Gang for the 10th edition of the Global Trajectory Optimization Competition. The methods used by our team are described. These methods involve: mothership targeting flyby to target high-value stars using a single impulse, fast ships targeting the edge of the galaxy and settler ships having a fast expansion, time-optimal three impulse transfer strategy to select the targets to get fast and wide spatial distribution. It is seen that there is a scope of improvement with respect to multi-star targeting for motherships. The results of the strategy are discussed.
Overview of Guidance, Navigation and Control System of the TeamIndus lunar lander
Jul 25, 2019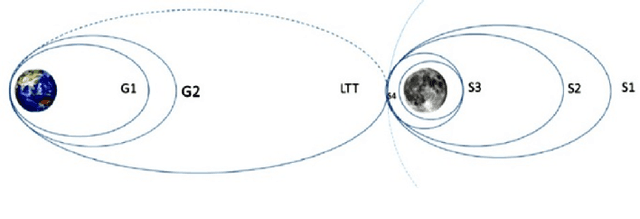
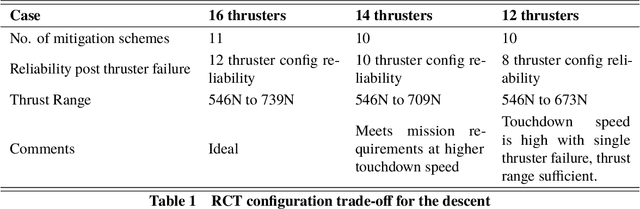
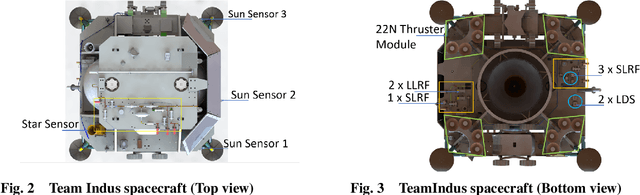
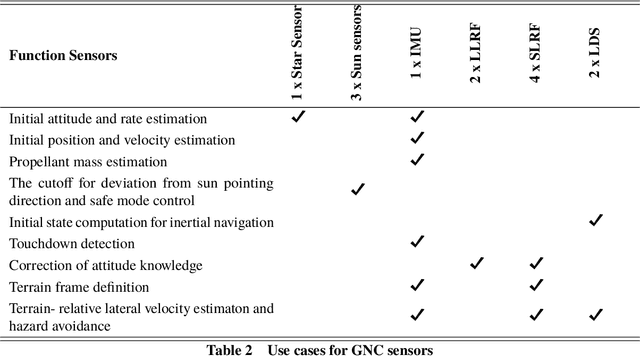
TeamIndus' lunar logistics vision includes multiple lunar missions to meet requirements of science, commercial and efforts towards global exploration. The first mission is slated for launch in 2020. The prime objective is to demonstrate autonomous precision lunar landing, and Surface Exploration Rover to collect data on the vicinity of the landing site. TeamIndus has developed various technologies towards lowering the access barrier to the lunar surface. This paper shall provide an overview of design of lander GNC system. The design of the GNC system has been described after concluding studies on sensor and actuator configurations. Frugal design approach is followed in the selection of GNC hardware. The paper describes the constraints for the orbital maneuvers and the lunar descent strategy. Various aspects of the GNC design of autonomous lunar descent maneuver: timeline of events, guidance, inertial and optical terrain-relative navigation schemes are described. The GNC software description focuses on system architecture, modes of operation, and core elements of the GNC software. The GNC algorithms have been tested using Monte-Carlo simulations and Processor-in-Loop runs. The paper concludes with a summary of key risk-mitigation studies for soft landing.