 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMic-hackathon 2024: Hackathon on Machine Learning for Electron and Scanning Probe Microscopy
Jun 10, 2025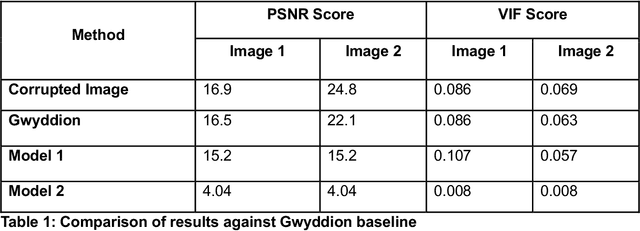

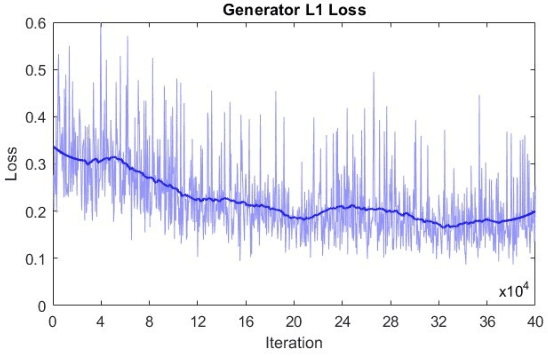
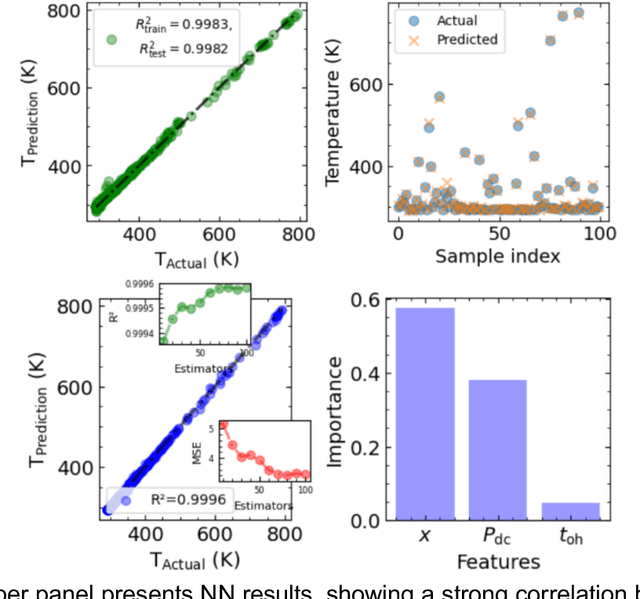
Microscopy is a primary source of information on materials structure and functionality at nanometer and atomic scales. The data generated is often well-structured, enriched with metadata and sample histories, though not always consistent in detail or format. The adoption of Data Management Plans (DMPs) by major funding agencies promotes preservation and access. However, deriving insights remains difficult due to the lack of standardized code ecosystems, benchmarks, and integration strategies. As a result, data usage is inefficient and analysis time is extensive. In addition to post-acquisition analysis, new APIs from major microscope manufacturers enable real-time, ML-based analytics for automated decision-making and ML-agent-controlled microscope operation. Yet, a gap remains between the ML and microscopy communities, limiting the impact of these methods on physics, materials discovery, and optimization. Hackathons help bridge this divide by fostering collaboration between ML researchers and microscopy experts. They encourage the development of novel solutions that apply ML to microscopy, while preparing a future workforce for instrumentation, materials science, and applied ML. This hackathon produced benchmark datasets and digital twins of microscopes to support community growth and standardized workflows. All related code is available at GitHub: https://github.com/KalininGroup/Mic-hackathon-2024-codes-publication/tree/1.0.0.1
Learning to Look Around: Enhancing Teleoperation and Learning with a Human-like Actuated Neck
Nov 01, 2024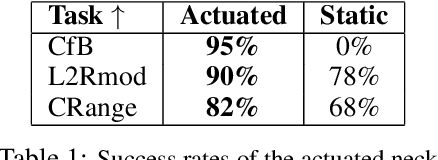



We introduce a teleoperation system that integrates a 5 DOF actuated neck, designed to replicate natural human head movements and perception. By enabling behaviors like peeking or tilting, the system provides operators with a more intuitive and comprehensive view of the environment, improving task performance, reducing cognitive load, and facilitating complex whole-body manipulation. We demonstrate the benefits of natural perception across seven challenging teleoperation tasks, showing how the actuated neck enhances the scope and efficiency of remote operation. Furthermore, we investigate its role in training autonomous policies through imitation learning. In three distinct tasks, the actuated neck supports better spatial awareness, reduces distribution shift, and enables adaptive task-specific adjustments compared to a static wide-angle camera.
Progress Towards Decoding Visual Imagery via fNIRS
Jun 11, 2024

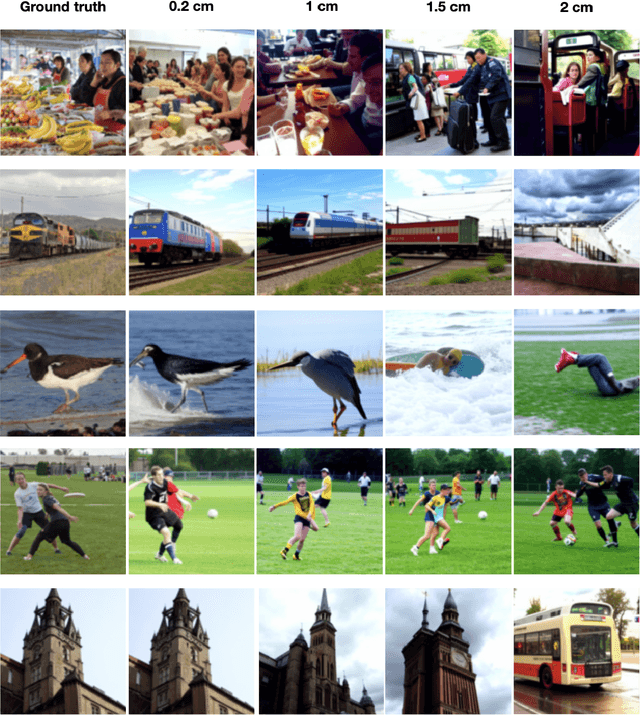
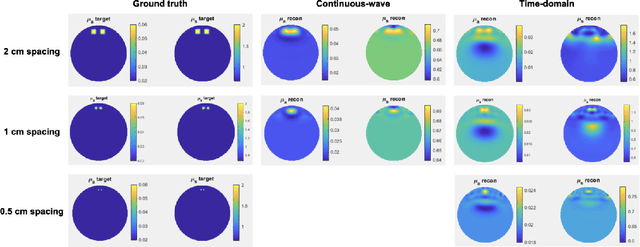
We demonstrate the possibility of reconstructing images from fNIRS brain activity and start building a prototype to match the required specs. By training an image reconstruction model on downsampled fMRI data, we discovered that cm-scale spatial resolution is sufficient for image generation. We obtained 71% retrieval accuracy with 1-cm resolution, compared to 93% on the full-resolution fMRI, and 20% with 2-cm resolution. With simulations and high-density tomography, we found that time-domain fNIRS can achieve 1-cm resolution, compared to 2-cm resolution for continuous-wave fNIRS. Lastly, we share designs for a prototype time-domain fNIRS device, consisting of a laser driver, a single photon detector, and a time-to-digital converter system.