 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLearning to Look Around: Enhancing Teleoperation and Learning with a Human-like Actuated Neck
Nov 01, 2024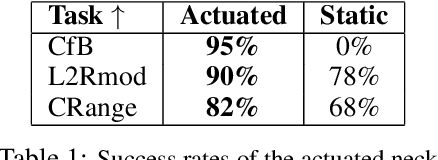



We introduce a teleoperation system that integrates a 5 DOF actuated neck, designed to replicate natural human head movements and perception. By enabling behaviors like peeking or tilting, the system provides operators with a more intuitive and comprehensive view of the environment, improving task performance, reducing cognitive load, and facilitating complex whole-body manipulation. We demonstrate the benefits of natural perception across seven challenging teleoperation tasks, showing how the actuated neck enhances the scope and efficiency of remote operation. Furthermore, we investigate its role in training autonomous policies through imitation learning. In three distinct tasks, the actuated neck supports better spatial awareness, reduces distribution shift, and enables adaptive task-specific adjustments compared to a static wide-angle camera.