 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDealing with Uncertainty on the Initial State of a Petri Net
Jan 30, 2013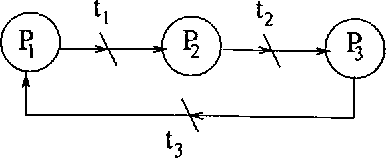
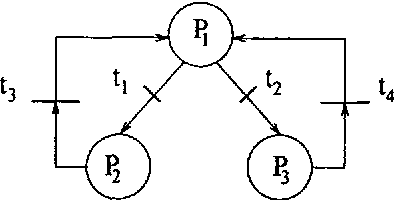

This paper proposes a method to find the actual state of a complex dynamic system from information coming from the sensors on the system himself, or on its environment. The nominal evolution of the system is a priori known and can be modeled (by an expert, for example), by different methods. In this paper, the Petri nets have been chosen. Contrary to the usual use of the Petri nets, the initial state of the system is unknown. So a degree of belief is bound to each places, or set of places. The theory used to model this uncertainty is the Dempster-Shafer's one which is well adapted to this type of problems. From the given Petri net characterizing the nominal evolution of the dynamic system, and from the observation inputs, the proposed method allows to determine according to the reliability of the model and the inputs, the state of the system at any time.
Sign Language Tutoring Tool
Feb 18, 2008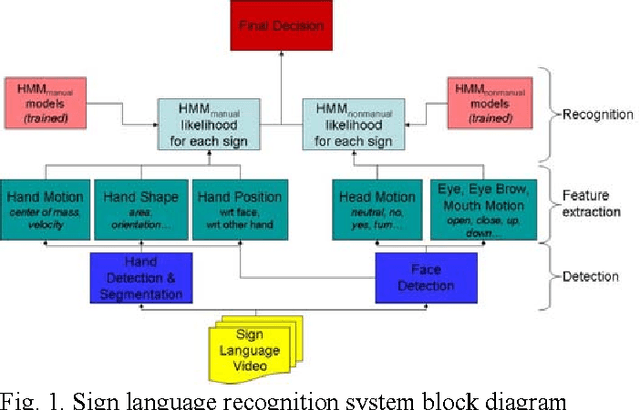
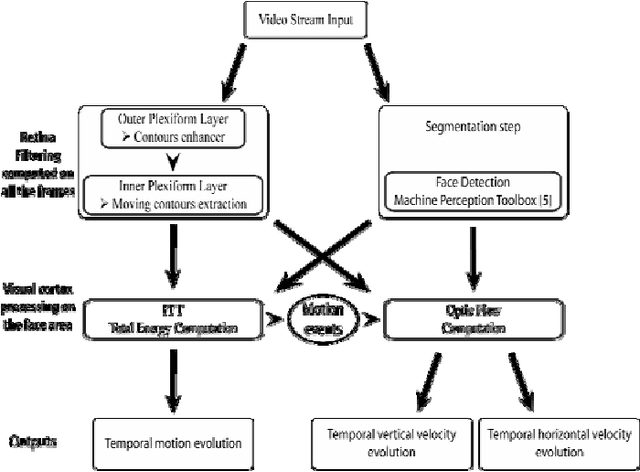
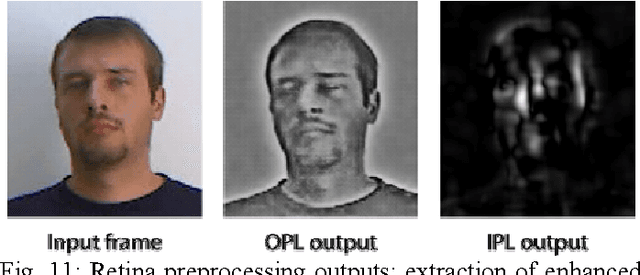
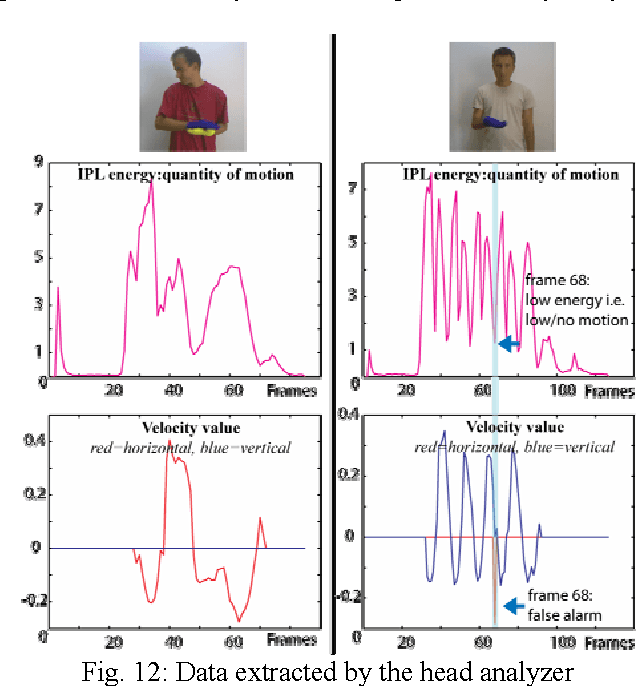
In this project, we have developed a sign language tutor that lets users learn isolated signs by watching recorded videos and by trying the same signs. The system records the user's video and analyses it. If the sign is recognized, both verbal and animated feedback is given to the user. The system is able to recognize complex signs that involve both hand gestures and head movements and expressions. Our performance tests yield a 99% recognition rate on signs involving only manual gestures and 85% recognition rate on signs that involve both manual and non manual components, such as head movement and facial expressions.