Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeThe Logical Options Framework
Feb 24, 2021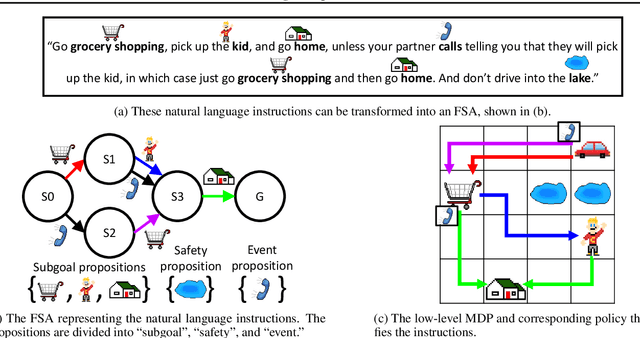
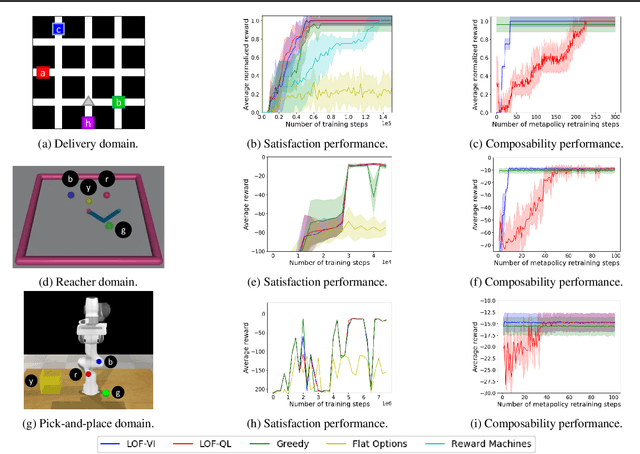
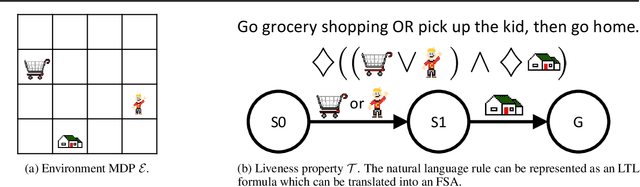
Learning composable policies for environments with complex rules and tasks is a challenging problem. We introduce a hierarchical reinforcement learning framework called the Logical Options Framework (LOF) that learns policies that are satisfying, optimal, and composable. LOF efficiently learns policies that satisfy tasks by representing the task as an automaton and integrating it into learning and planning. We provide and prove conditions under which LOF will learn satisfying, optimal policies. And lastly, we show how LOF's learned policies can be composed to satisfy unseen tasks with only 10-50 retraining steps. We evaluate LOF on four tasks in discrete and continuous domains, including a 3D pick-and-place environment.
* 23 pages, 19 figures
Via