 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDG16M: A Large-Scale Dataset for Dual-Arm Grasping with Force-Optimized Grasps
Mar 11, 2025


Dual-arm robotic grasping is crucial for handling large objects that require stable and coordinated manipulation. While single-arm grasping has been extensively studied, datasets tailored for dual-arm settings remain scarce. We introduce a large-scale dataset of 16 million dual-arm grasps, evaluated under improved force-closure constraints. Additionally, we develop a benchmark dataset containing 300 objects with approximately 30,000 grasps, evaluated in a physics simulation environment, providing a better grasp quality assessment for dual-arm grasp synthesis methods. Finally, we demonstrate the effectiveness of our dataset by training a Dual-Arm Grasp Classifier network that outperforms the state-of-the-art methods by 15\%, achieving higher grasp success rates and improved generalization across objects.
DA-VIL: Adaptive Dual-Arm Manipulation with Reinforcement Learning and Variable Impedance Control
Oct 25, 2024



Dual-arm manipulation is an area of growing interest in the robotics community. Enabling robots to perform tasks that require the coordinated use of two arms, is essential for complex manipulation tasks such as handling large objects, assembling components, and performing human-like interactions. However, achieving effective dual-arm manipulation is challenging due to the need for precise coordination, dynamic adaptability, and the ability to manage interaction forces between the arms and the objects being manipulated. We propose a novel pipeline that combines the advantages of policy learning based on environment feedback and gradient-based optimization to learn controller gains required for the control outputs. This allows the robotic system to dynamically modulate its impedance in response to task demands, ensuring stability and dexterity in dual-arm operations. We evaluate our pipeline on a trajectory-tracking task involving a variety of large, complex objects with different masses and geometries. The performance is then compared to three other established methods for controlling dual-arm robots, demonstrating superior results.
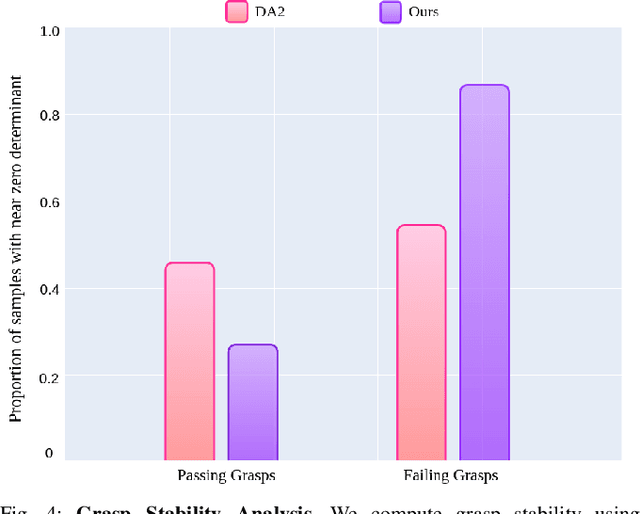
Constrained 6-DoF Grasp Generation on Complex Shapes for Improved Dual-Arm Manipulation
Apr 06, 2024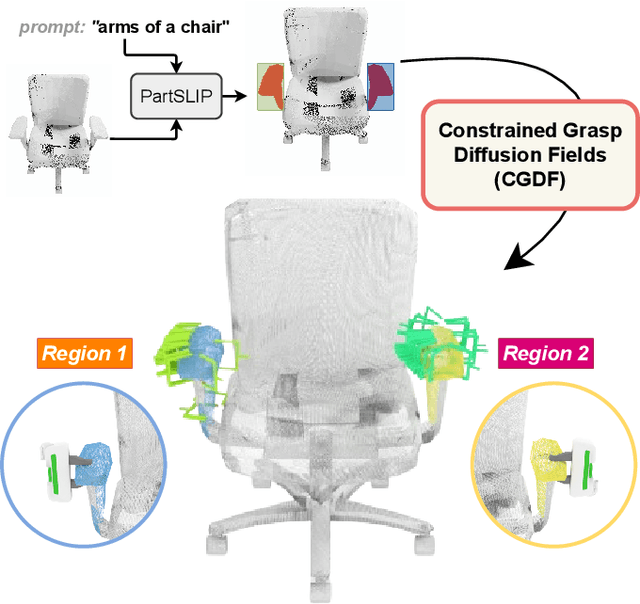
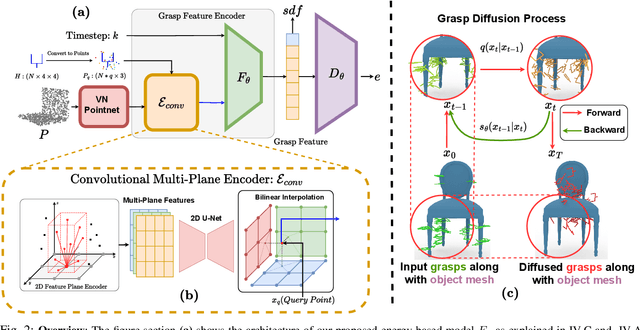
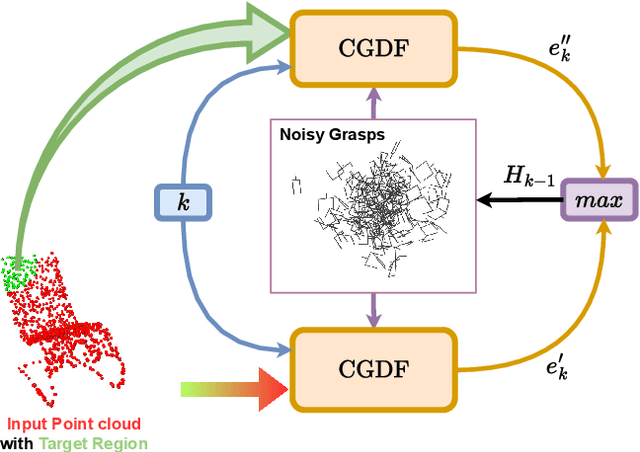
Efficiently generating grasp poses tailored to specific regions of an object is vital for various robotic manipulation tasks, especially in a dual-arm setup. This scenario presents a significant challenge due to the complex geometries involved, requiring a deep understanding of the local geometry to generate grasps efficiently on the specified constrained regions. Existing methods only explore settings involving table-top/small objects and require augmented datasets to train, limiting their performance on complex objects. We propose CGDF: Constrained Grasp Diffusion Fields, a diffusion-based grasp generative model that generalizes to objects with arbitrary geometries, as well as generates dense grasps on the target regions. CGDF uses a part-guided diffusion approach that enables it to get high sample efficiency in constrained grasping without explicitly training on massive constraint-augmented datasets. We provide qualitative and quantitative comparisons using analytical metrics and in simulation, in both unconstrained and constrained settings to show that our method can generalize to generate stable grasps on complex objects, especially useful for dual-arm manipulation settings, while existing methods struggle to do so.