 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLearning Hierarchical Control for Robust In-Hand Manipulation
Oct 24, 2019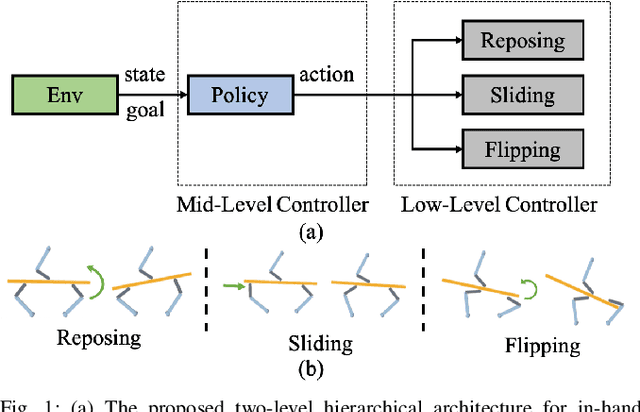
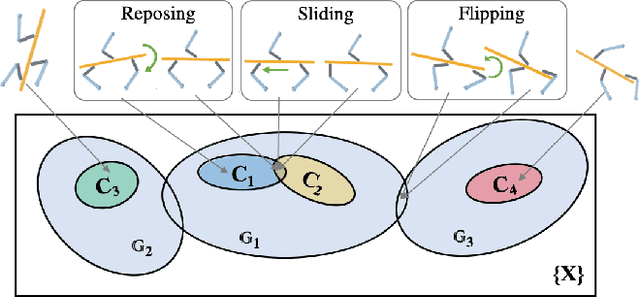
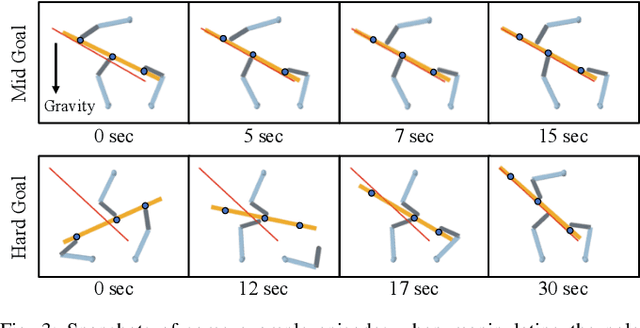
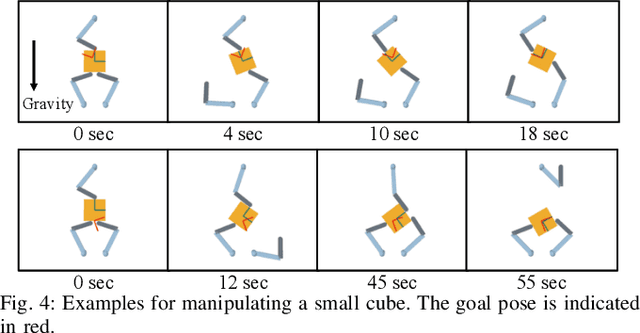
Robotic in-hand manipulation has been a long-standing challenge due to the complexity of modelling hand and object in contact and of coordinating finger motion for complex manipulation sequences. To address these challenges, the majority of prior work has either focused on model-based, low-level controllers or on model-free deep reinforcement learning that each have their own limitations. We propose a hierarchical method that relies on traditional, model-based controllers on the low-level and learned policies on the mid-level. The low-level controllers can robustly execute different manipulation primitives (reposing, sliding, flipping). The mid-level policy orchestrates these primitives. We extensively evaluate our approach in simulation with a 3-fingered hand that controls three degrees of freedom of elongated objects. We show that our approach can move objects between almost all the possible poses in the workspace while keeping them firmly grasped. We also show that our approach is robust to inaccuracies in the object models and to observation noise. Finally, we show how our approach generalizes to objects of other shapes.
Learning to Solve a Rubik's Cube with a Dexterous Hand
Jul 26, 2019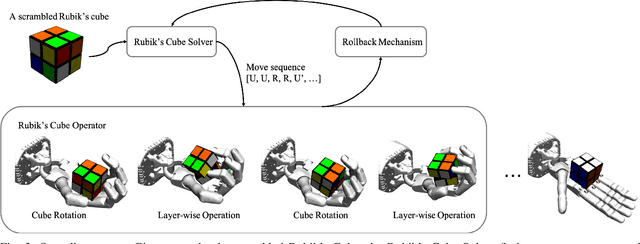
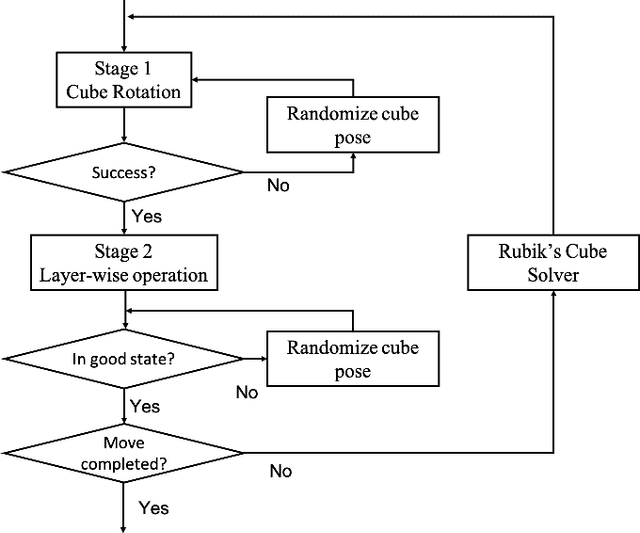
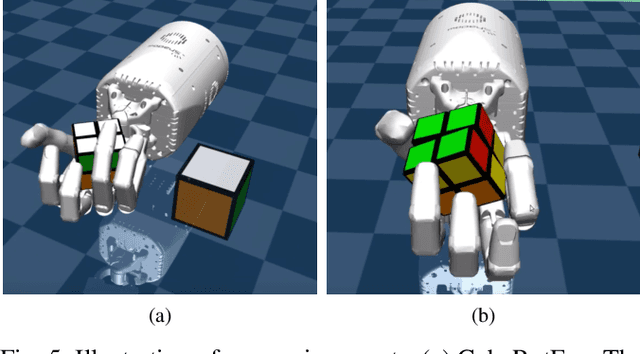
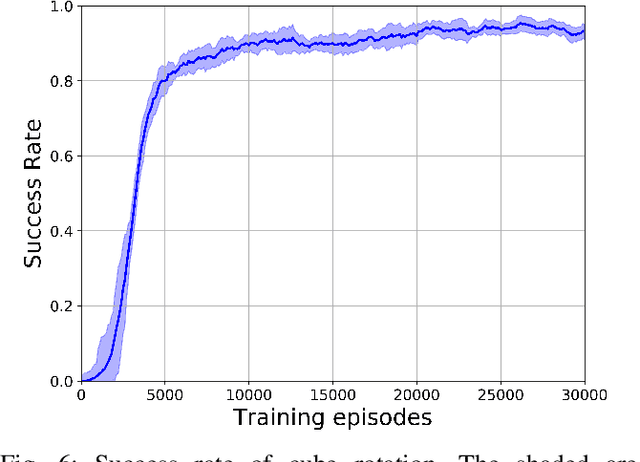
We present a learning-based approach to solving a Rubik's cube with a multi-fingered dexterous hand. Despite the promising performance of dexterous in-hand manipulation, solving complex tasks which involve multiple steps and diverse internal object structure has remained an important, yet challenging task. In this paper, we tackle this challenge with a hierarchical deep reinforcement learning method, which separates planning and manipulation. A model-based cube solver finds an optimal move sequence for restoring the cube and a model-free cube operator controls all five fingers to execute each move step by step. To train our models, we build a high-fidelity simulator which manipulates a Rubik's Cube, an object containing high-dimensional state space, with a 24-DoF robot hand. Extensive experiments on 1400 randomly scrambled Rubik's cubes demonstrate the effectiveness of our method, achieving an average success rate of 90.3%.