 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLearning to Solve a Rubik's Cube with a Dexterous Hand
Jul 26, 2019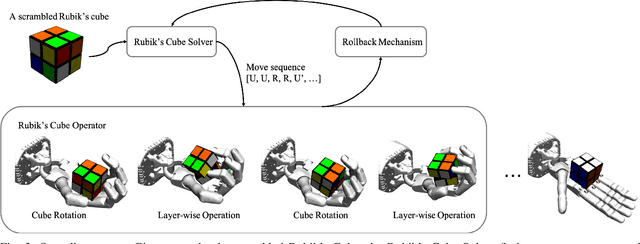
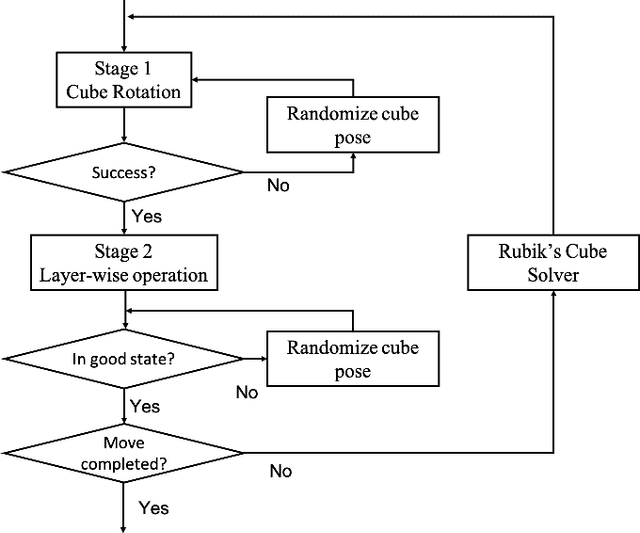
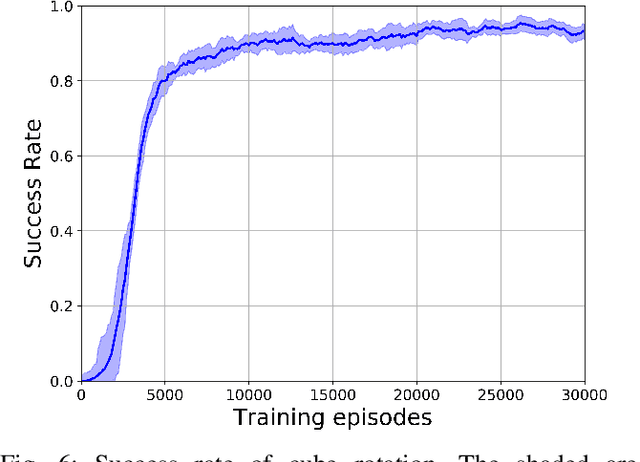
We present a learning-based approach to solving a Rubik's cube with a multi-fingered dexterous hand. Despite the promising performance of dexterous in-hand manipulation, solving complex tasks which involve multiple steps and diverse internal object structure has remained an important, yet challenging task. In this paper, we tackle this challenge with a hierarchical deep reinforcement learning method, which separates planning and manipulation. A model-based cube solver finds an optimal move sequence for restoring the cube and a model-free cube operator controls all five fingers to execute each move step by step. To train our models, we build a high-fidelity simulator which manipulates a Rubik's Cube, an object containing high-dimensional state space, with a 24-DoF robot hand. Extensive experiments on 1400 randomly scrambled Rubik's cubes demonstrate the effectiveness of our method, achieving an average success rate of 90.3%.