 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMulti UAVs Preflight Planning in a Shared and Dynamic Airspace
Feb 12, 2026Preflight planning for large-scale Unmanned Aerial Vehicle (UAV) fleets in dynamic, shared airspace presents significant challenges, including temporal No-Fly Zones (NFZs), heterogeneous vehicle profiles, and strict delivery deadlines. While Multi-Agent Path Finding (MAPF) provides a formal framework, existing methods often lack the scalability and flexibility required for real-world Unmanned Traffic Management (UTM). We propose DTAPP-IICR: a Delivery-Time Aware Prioritized Planning method with Incremental and Iterative Conflict Resolution. Our framework first generates an initial solution by prioritizing missions based on urgency. Secondly, it computes roundtrip trajectories using SFIPP-ST, a novel 4D single-agent planner (Safe Flight Interval Path Planning with Soft and Temporal Constraints). SFIPP-ST handles heterogeneous UAVs, strictly enforces temporal NFZs, and models inter-agent conflicts as soft constraints. Subsequently, an iterative Large Neighborhood Search, guided by a geometric conflict graph, efficiently resolves any residual conflicts. A completeness-preserving directional pruning technique further accelerates the 3D search. On benchmarks with temporal NFZs, DTAPP-IICR achieves near-100% success with fleets of up to 1,000 UAVs and gains up to 50% runtime reduction from pruning, outperforming batch Enhanced Conflict-Based Search in the UTM context. Scaling successfully in realistic city-scale operations where other priority-based methods fail even at moderate deployments, DTAPP-IICR is positioned as a practical and scalable solution for preflight planning in dense, dynamic urban airspace.
Exploratory Visual Analysis for Increasing Data Readiness in Artificial Intelligence Projects
Sep 05, 2024



We present experiences and lessons learned from increasing data readiness of heterogeneous data for artificial intelligence projects using visual analysis methods. Increasing the data readiness level involves understanding both the data as well as the context in which it is used, which are challenges well suitable to visual analysis. For this purpose, we contribute a mapping between data readiness aspects and visual analysis techniques suitable for different data types. We use the defined mapping to increase data readiness levels in use cases involving time-varying data, including numerical, categorical, and text. In addition to the mapping, we extend the data readiness concept to better take aspects of the task and solution into account and explicitly address distribution shifts during data collection time. We report on our experiences in using the presented visual analysis techniques to aid future artificial intelligence projects in raising the data readiness level.
Deep Temporal Deaggregation: Large-Scale Spatio-Temporal Generative Models
Jun 18, 2024Many of today's data is time-series data originating from various sources, such as sensors, transaction systems, or production systems. Major challenges with such data include privacy and business sensitivity. Generative time-series models have the potential to overcome these problems, allowing representative synthetic data, such as people's movement in cities, to be shared openly and be used to the benefit of society at large. However, contemporary approaches are limited to prohibitively short sequences and small scales. Aside from major memory limitations, the models generate less accurate and less representative samples the longer the sequences are. This issue is further exacerbated by the lack of a comprehensive and accessible benchmark. Furthermore, a common need in practical applications is what-if analysis and dynamic adaptation to data distribution changes, for usage in decision making and to manage a changing world: What if this road is temporarily blocked or another road is added? The focus of this paper is on mobility data, such as people's movement in cities, requiring all these issues to be addressed. To this end, we propose a transformer-based diffusion model, TDDPM, for time-series which outperforms and scales substantially better than state-of-the-art. This is evaluated in a new comprehensive benchmark across several sequence lengths, standard datasets, and evaluation measures. We also demonstrate how the model can be conditioned on a prior over spatial occupancy frequency information, allowing the model to generate mobility data for previously unseen environments and for hypothetical scenarios where the underlying road network and its usage changes. This is evaluated by training on mobility data from part of a city. Then, using only aggregate spatial information as prior, we demonstrate out-of-distribution generalization to the unobserved remainder of the city.
Autonomous 3D Exploration in Large-Scale Environments with Dynamic Obstacles
Oct 27, 2023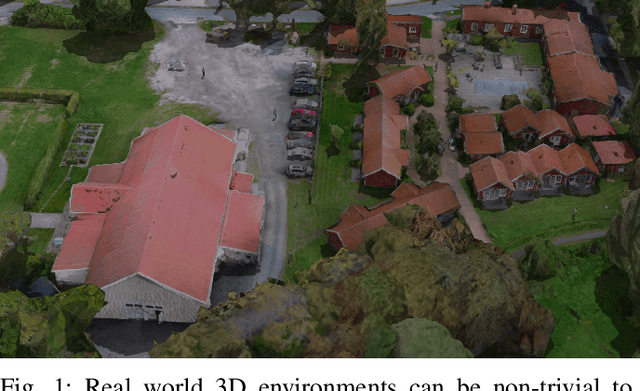
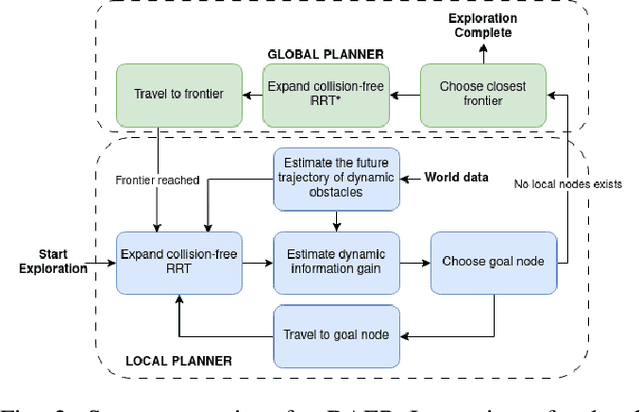
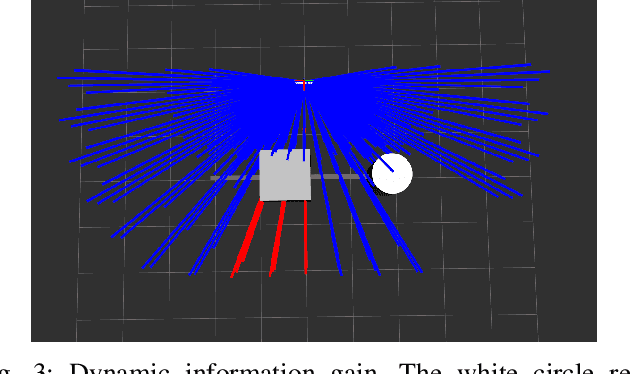
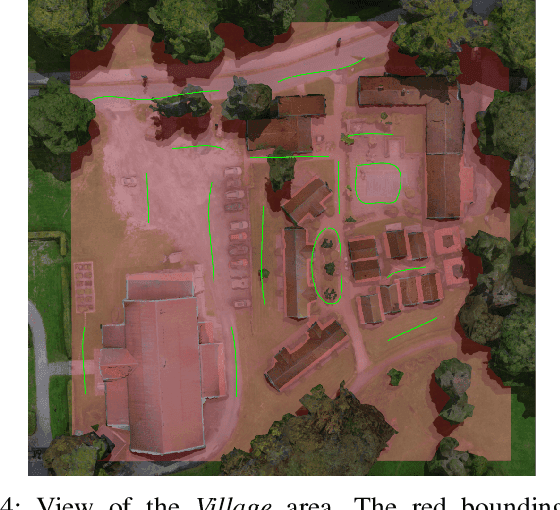
Exploration in dynamic and uncertain real-world environments is an open problem in robotics and constitutes a foundational capability of autonomous systems operating in most of the real world. While 3D exploration planning has been extensively studied, the environments are assumed static or only reactive collision avoidance is carried out. We propose a novel approach to not only avoid dynamic obstacles but also include them in the plan itself, to exploit the dynamic environment in the agent's favor. The proposed planner, Dynamic Autonomous Exploration Planner (DAEP), extends AEP to explicitly plan with respect to dynamic obstacles. To thoroughly evaluate exploration planners in such settings we propose a new enhanced benchmark suite with several dynamic environments, including large-scale outdoor environments. DAEP outperform state-of-the-art planners in dynamic and large-scale environments. DAEP is shown to be more effective at both exploration and collision avoidance.
Towards Utilitarian Combinatorial Assignment with Deep Neural Networks and Heuristic Algorithms
Jul 01, 2021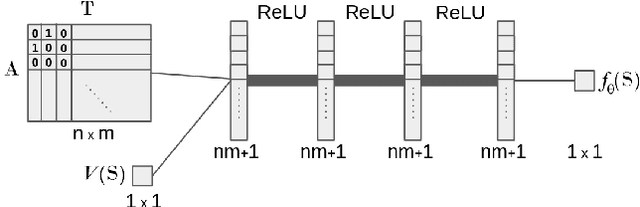
This paper presents preliminary work on using deep neural networks to guide general-purpose heuristic algorithms for performing utilitarian combinatorial assignment. In more detail, we use deep learning in an attempt to produce heuristics that can be used together with e.g., search algorithms to generate feasible solutions of higher quality more quickly. Our results indicate that our approach could be a promising future method for constructing such heuristics.
Enhancing Lattice-based Motion Planning with Introspective Learning and Reasoning
May 15, 2020



Lattice-based motion planning is a hybrid planning method where a plan made up of discrete actions simultaneously is a physically feasible trajectory. The planning takes both discrete and continuous aspects into account, for example action pre-conditions and collision-free action-duration in the configuration space. Safe motion planing rely on well-calibrated safety-margins for collision checking. The trajectory tracking controller must further be able to reliably execute the motions within this safety margin for the execution to be safe. In this work we are concerned with introspective learning and reasoning about controller performance over time. Normal controller execution of the different actions is learned using reliable and uncertainty-aware machine learning techniques. By correcting for execution bias we manage to substantially reduce the safety margin of motion actions. Reasoning takes place to both verify that the learned models stays safe and to improve collision checking effectiveness in the motion planner by the use of more accurate execution predictions with a smaller safety margin. The presented approach allows for explicit awareness of controller performance under normal circumstances, and timely detection of incorrect performance in abnormal circumstances. Evaluation is made on the nonlinear dynamics of a quadcopter in 3D using simulation. Video: https://youtu.be/STmZduvSUMM