 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAutonomous Reinforcement of Behavioral Sequences in Neural Dynamics
May 14, 2013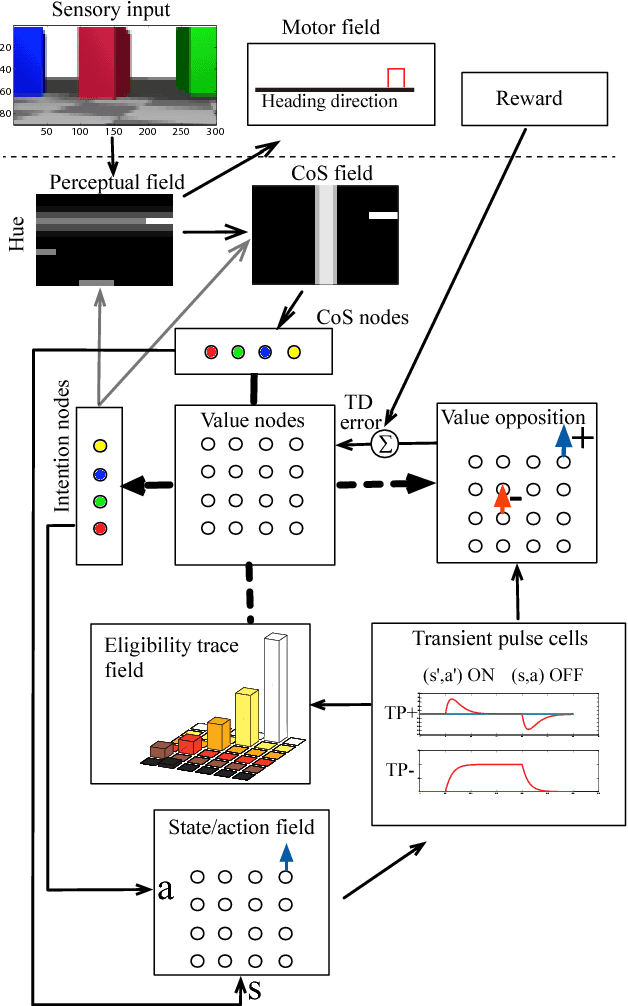
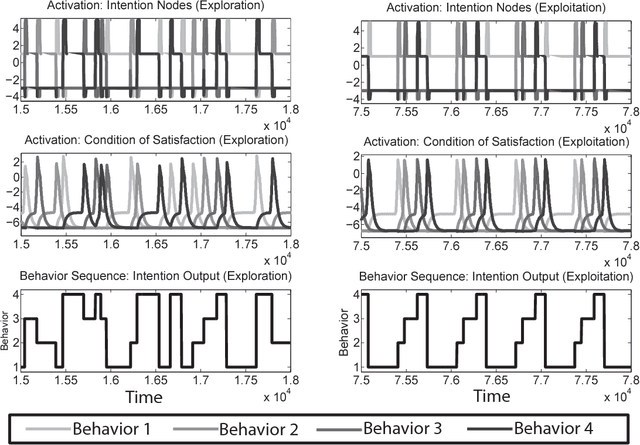

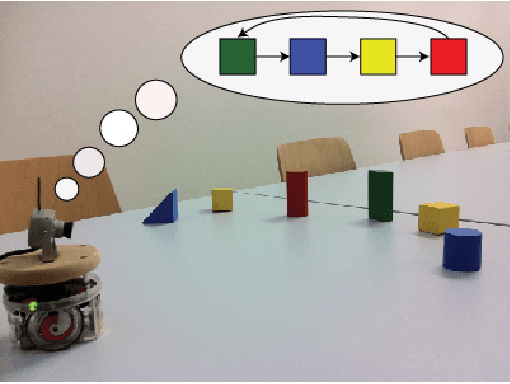
We introduce a dynamic neural algorithm called Dynamic Neural (DN) SARSA(\lambda) for learning a behavioral sequence from delayed reward. DN-SARSA(\lambda) combines Dynamic Field Theory models of behavioral sequence representation, classical reinforcement learning, and a computational neuroscience model of working memory, called Item and Order working memory, which serves as an eligibility trace. DN-SARSA(\lambda) is implemented on both a simulated and real robot that must learn a specific rewarding sequence of elementary behaviors from exploration. Results show DN-SARSA(\lambda) performs on the level of the discrete SARSA(\lambda), validating the feasibility of general reinforcement learning without compromising neural dynamics.
Incremental Slow Feature Analysis: Adaptive and Episodic Learning from High-Dimensional Input Streams
Dec 09, 2011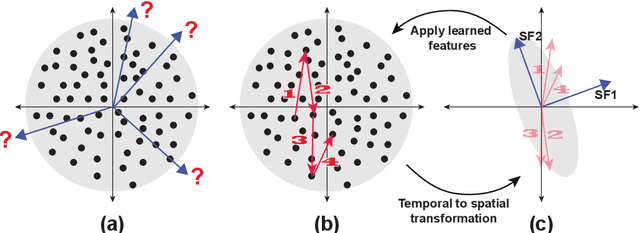
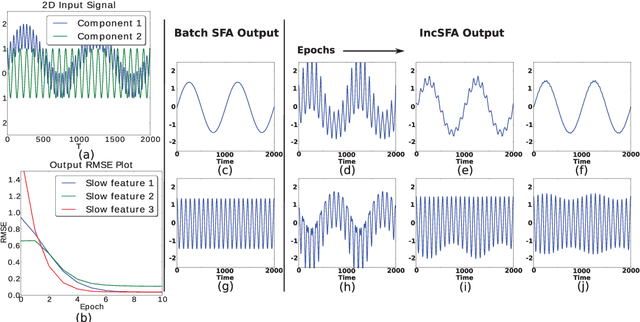
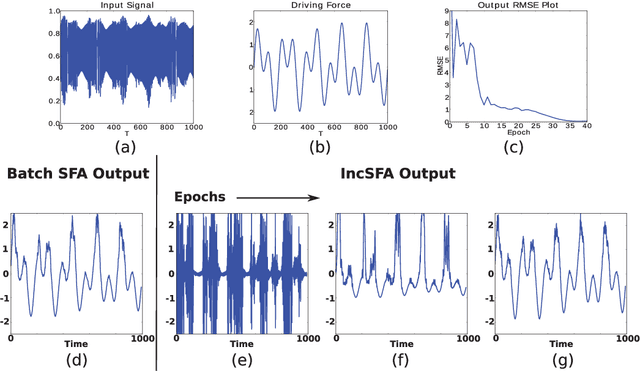
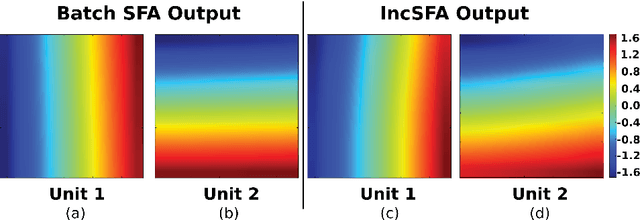
Slow Feature Analysis (SFA) extracts features representing the underlying causes of changes within a temporally coherent high-dimensional raw sensory input signal. Our novel incremental version of SFA (IncSFA) combines incremental Principal Components Analysis and Minor Components Analysis. Unlike standard batch-based SFA, IncSFA adapts along with non-stationary environments, is amenable to episodic training, is not corrupted by outliers, and is covariance-free. These properties make IncSFA a generally useful unsupervised preprocessor for autonomous learning agents and robots. In IncSFA, the CCIPCA and MCA updates take the form of Hebbian and anti-Hebbian updating, extending the biological plausibility of SFA. In both single node and deep network versions, IncSFA learns to encode its input streams (such as high-dimensional video) by informative slow features representing meaningful abstract environmental properties. It can handle cases where batch SFA fails.