 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeIntrinsically Motivated Acquisition of Modular Slow Features for Humanoids in Continuous and Non-Stationary Environments
Jan 17, 2017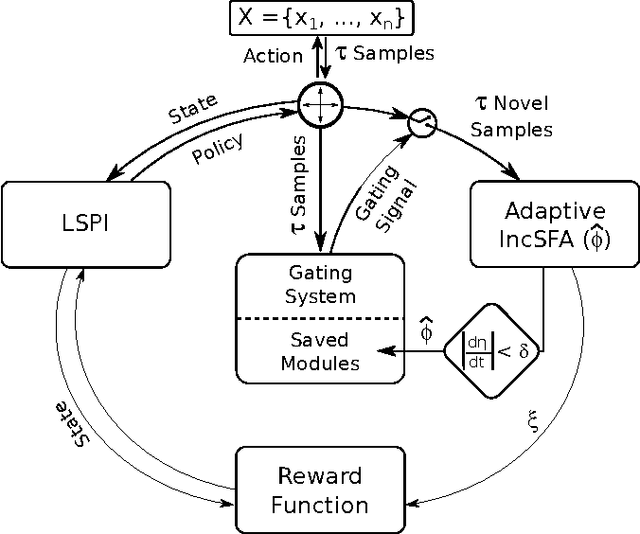
A compact information-rich representation of the environment, also called a feature abstraction, can simplify a robot's task of mapping its raw sensory inputs to useful action sequences. However, in environments that are non-stationary and only partially observable, a single abstraction is probably not sufficient to encode most variations. Therefore, learning multiple sets of spatially or temporally local, modular abstractions of the inputs would be beneficial. How can a robot learn these local abstractions without a teacher? More specifically, how can it decide from where and when to start learning a new abstraction? A recently proposed algorithm called Curious Dr. MISFA addresses this problem. The algorithm is based on two underlying learning principles called artificial curiosity and slowness. The former is used to make the robot self-motivated to explore by rewarding itself whenever it makes progress learning an abstraction; the later is used to update the abstraction by extracting slowly varying components from raw sensory inputs. Curious Dr. MISFA's application is, however, limited to discrete domains constrained by a pre-defined state space and has design limitations that make it unstable in certain situations. This paper presents a significant improvement that is applicable to continuous environments, is computationally less expensive, simpler to use with fewer hyper parameters, and stable in certain non-stationary environments. We demonstrate the efficacy and stability of our method in a vision-based robot simulator.
Incremental Slow Feature Analysis: Adaptive and Episodic Learning from High-Dimensional Input Streams
Dec 09, 2011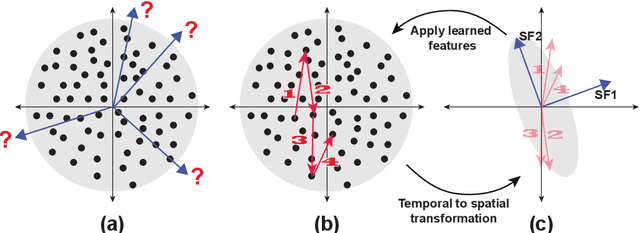
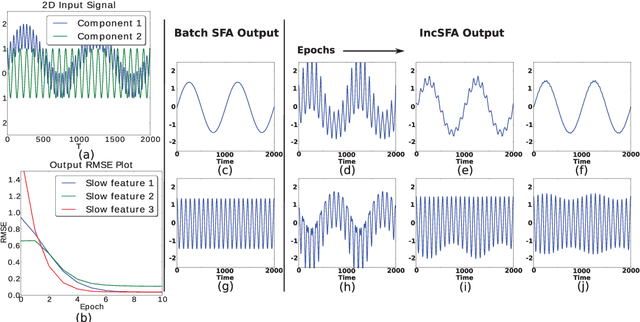
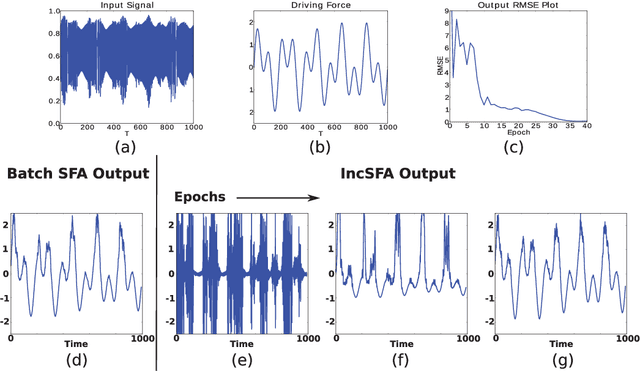
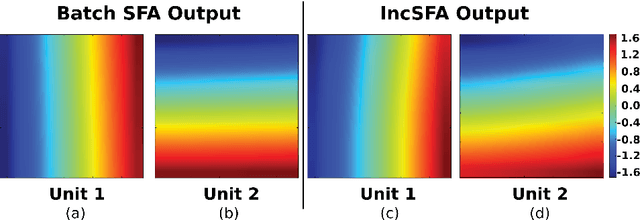
Slow Feature Analysis (SFA) extracts features representing the underlying causes of changes within a temporally coherent high-dimensional raw sensory input signal. Our novel incremental version of SFA (IncSFA) combines incremental Principal Components Analysis and Minor Components Analysis. Unlike standard batch-based SFA, IncSFA adapts along with non-stationary environments, is amenable to episodic training, is not corrupted by outliers, and is covariance-free. These properties make IncSFA a generally useful unsupervised preprocessor for autonomous learning agents and robots. In IncSFA, the CCIPCA and MCA updates take the form of Hebbian and anti-Hebbian updating, extending the biological plausibility of SFA. In both single node and deep network versions, IncSFA learns to encode its input streams (such as high-dimensional video) by informative slow features representing meaningful abstract environmental properties. It can handle cases where batch SFA fails.