Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAutonomous Reinforcement of Behavioral Sequences in Neural Dynamics
Paper and Code
May 14, 2013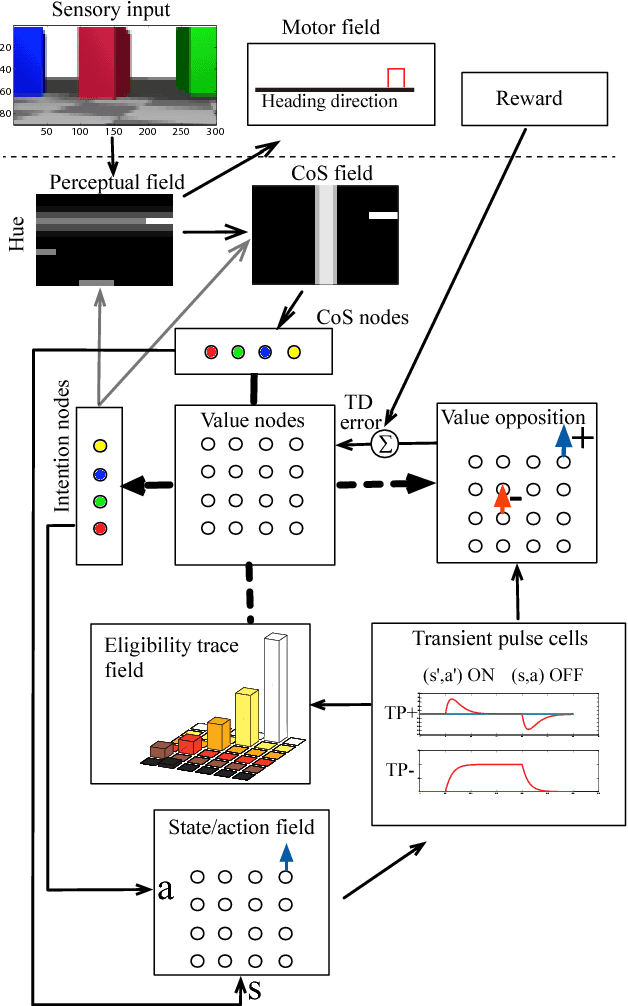
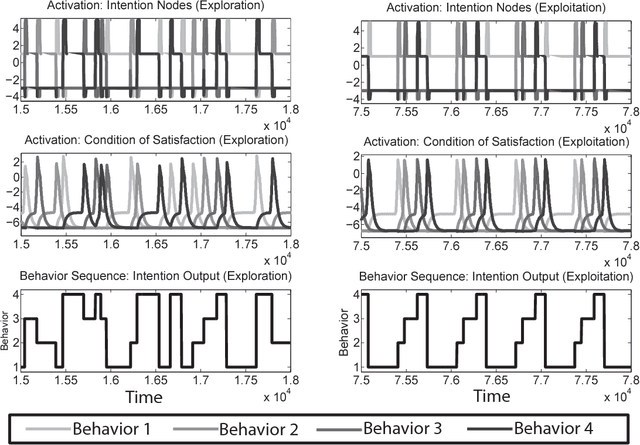

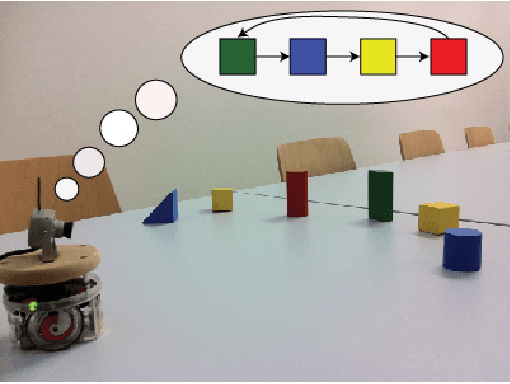
We introduce a dynamic neural algorithm called Dynamic Neural (DN) SARSA(\lambda) for learning a behavioral sequence from delayed reward. DN-SARSA(\lambda) combines Dynamic Field Theory models of behavioral sequence representation, classical reinforcement learning, and a computational neuroscience model of working memory, called Item and Order working memory, which serves as an eligibility trace. DN-SARSA(\lambda) is implemented on both a simulated and real robot that must learn a specific rewarding sequence of elementary behaviors from exploration. Results show DN-SARSA(\lambda) performs on the level of the discrete SARSA(\lambda), validating the feasibility of general reinforcement learning without compromising neural dynamics.
* Sohrob Kazerounian, Matthew Luciw are Joint first authors
View paper on