 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTopology Recoverability Prediction for Ad-Hoc Robot Networks: A Data-Driven Fault-Tolerant Approach
Oct 30, 2023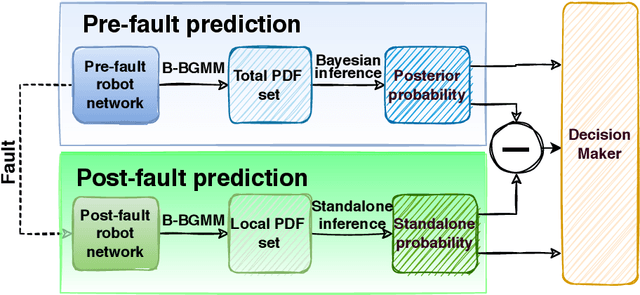
Faults occurring in ad-hoc robot networks may fatally perturb their topologies leading to disconnection of subsets of those networks. Optimal topology synthesis is generally resource-intensive and time-consuming to be done in real time for large ad-hoc robot networks. One should only perform topology re-computations if the probability of topology recoverability after the occurrence of any fault surpasses that of its irrecoverability. We formulate this problem as a binary classification problem. Then, we develop a two-pathway data-driven model based on Bayesian Gaussian mixture models that predicts the solution to a typical problem by two different pre-fault and post-fault prediction pathways. The results, obtained by the integration of the predictions of those pathways, clearly indicate the success of our model in solving the topology (ir)recoverability prediction problem compared to the best of current strategies found in the literature.
Supervisory Coordination of Robotic Fiber Positioners in Multi-Object Spectrographs
Oct 10, 2022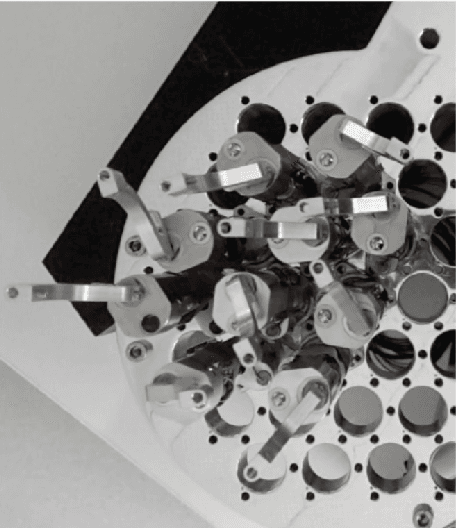

In this paper, we solve the complete coordination problem of robotic fiber positioners using supervisory control theory. In particular, we model positioners and their behavioral specifications as discrete-event systems by the discretization of their motion spaces. We synthesize a coordination supervisor associated with a specific set of positioners. In particular, the coordination supervisor includes the solutions to the complete coordination problem of its corresponding positioners. Then, we use the backtracking forcibility technique of supervisory control theory to present an algorithm based on a completeness condition to solve the coordination problem similar to a reconfiguration problem. We illustrate the functionality of our method using an example.
Self-organizing nest migration dynamics synthesis for ant colony systems
Oct 08, 2022In this study, we synthesize a novel dynamical approach for ant colonies enabling them to migrate to new nest sites in a self-organizing fashion. In other words, we realize ant colony migration as a self-organizing phenotype-level collective behavior. For this purpose, we first segment the edges of the graph of ants' pathways. Then, each segment, attributed to its own pheromone profile, may host an ant. So, multiple ants may occupy an edge at the same time. Thanks to this segment-wise edge formulation, ants have more selection options in the course of their pathway determination, thereby increasing the diversity of their colony's emergent behaviors. In light of the continuous pheromone dynamics of segments, each edge owns a spatio-temporal piece-wise continuous pheromone profile in which both deposit and evaporation processes are unified. The passive dynamics of the proposed migration mechanism is sufficiently rich so that an ant colony can migrate to the vicinity of a new nest site in a self-organizing manner without any external supervision. In particular, we perform extensive simulations to test our migration dynamics applied to a colony including 500 ants traversing a pathway graph comprising 200 nodes and 4000 edges which are segmented based on various resolutions. The obtained results exhibit the effectiveness of our strategy.
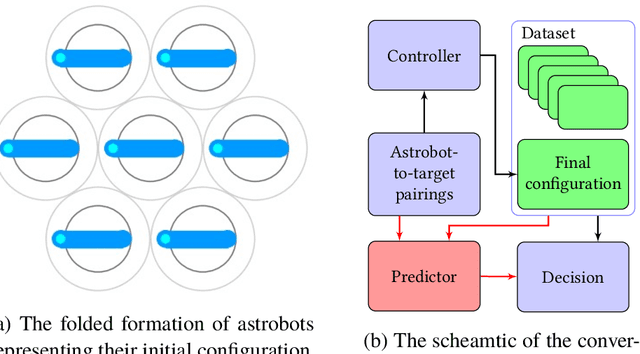
Learning convergence prediction of astrobots in multi-object spectrographs
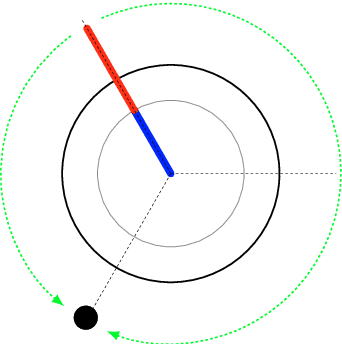
Oct 05, 2022Astrobot swarms are used to capture astronomical signals to generate the map of the observable universe for the purpose of dark energy studies. The convergence of each swarm in the course of its coordination has to surpass a particular threshold to yield a satisfactory map. The current coordination methods do not always reach desired convergence rates. Moreover, these methods are so complicated that one cannot formally verify their results without resource-demanding simulations. Thus, we use support vector machines to train a model which can predict the convergence of a swarm based on the data of previous coordination of that swarm. Given a fixed parity, i.e., the rotation direction of the outer arm of an astrobot, corresponding to a swarm, our algorithm reaches a better predictive performance compared to the state of the art. Additionally, we revise our algorithm to solve a more generalized convergence prediction problem according to which the parities of astrobots may differ. We present the prediction results of a generalized scenario, associated with a 487-astrobot swarm, which are interestingly efficient and collision-free given the excessive complexity of this scenario compared to the constrained one.
Astrobotics: Swarm Robotics for Astrophysical Studies
Oct 05, 2022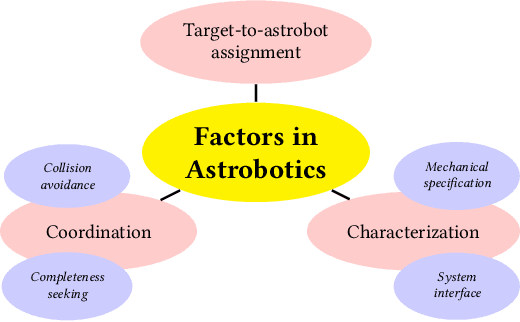
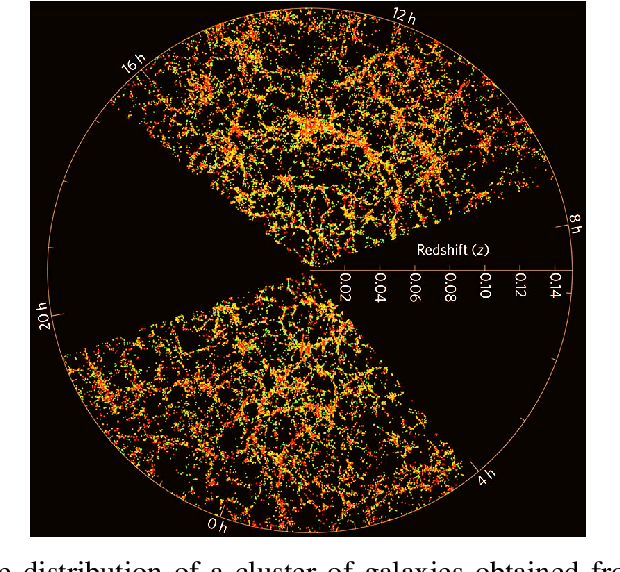
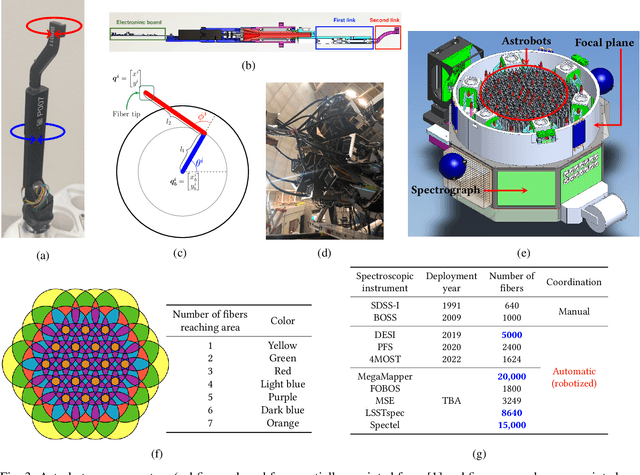
This paper introduces the emerging field of astrobotics, that is, a recently-established branch of robotics to be of service to astrophysics and observational astronomy. We first describe a modern requirement of dark matter studies, i.e., the generation of the map of the observable universe, using astrobots. Astrobots differ from conventional two-degree-of-freedom robotic manipulators in two respects. First, the dense formation of astrobots give rise to the extremely overlapping dynamics of neighboring astrobots which make them severely subject to collisions. Second, the structure of astrobots and their mechanical specifications are specialized due to the embedded optical fibers passed through them. We focus on the coordination problem of astrobots whose solutions shall be collision-free, fast execution, and complete in terms of the astrobots' convergence rates. We also illustrate the significant impact of astrobots assignments to observational targets on the quality of coordination solutions To present the current state of the field, we elaborate the open problems including next-generation astrophysical projects including 20,000 astrobots, and other fields, such as space debris tracking, in which astrobots may be potentially used
Meta Navigation Functions: Adaptive Associations for Coordination of Multi-Agent Systems
Oct 04, 2022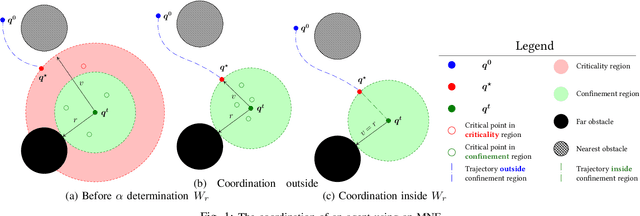
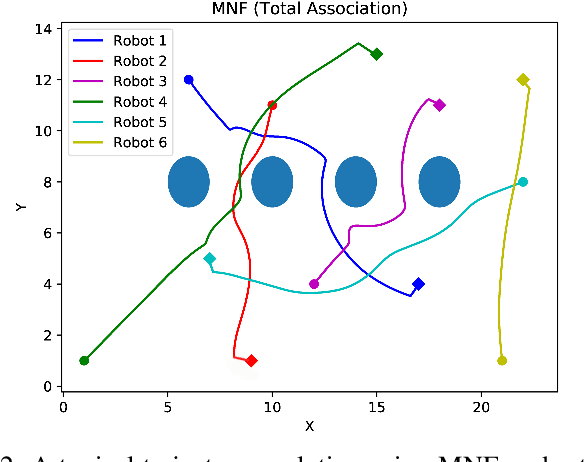
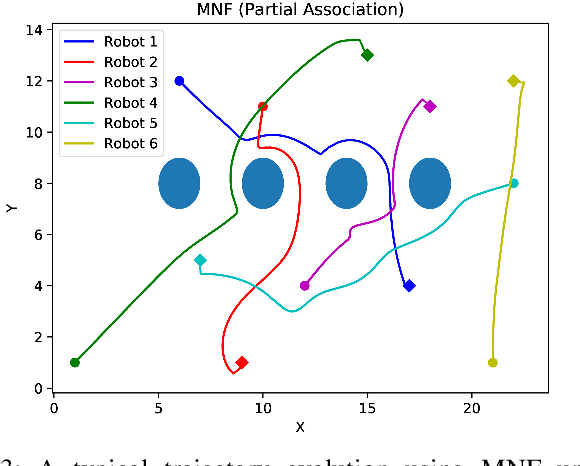
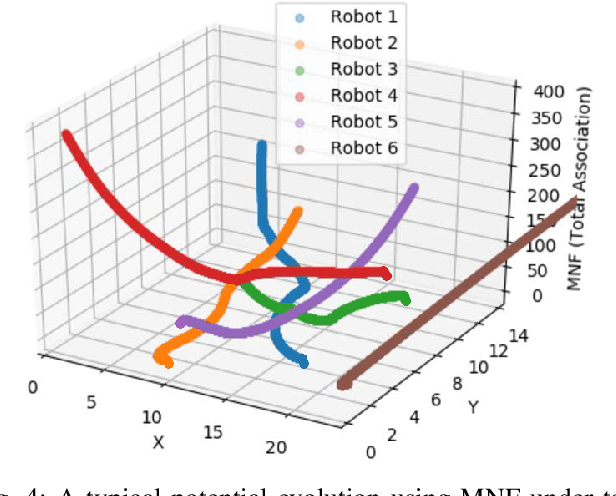
In this paper, we introduce a new class of potential fields, i.e., meta navigation functions (MNFs) to coordinate multi-agent systems. Thanks to the MNF formulation, agents can contribute to each other's coordination via partial and/or total associations, contrary to traditional decentralized navigation functions (DNFs). In particular, agents may stimulate each other via their MNFs. Moreover, MNFs need to be confined which is a weaker condition compared to the Morse condition of DNFs. An MNF is composed of a confined function and an attraction kernel. The critical points of the former can be confined in a safe region around a target critical point. The collision-free trajectory of an agent and its associations to its peers are governed by a confined function before reaching its safe region. Then, the attraction kernel drives the agent to its target in the safe region. MNFs provide faster coordination compared to DNFs. We illustrate how MNFs may exhibit some social behaviors in the course of partial and total associations among agents. Our simulations verify the efficiency of MNFs to coordinate complex swarms of agents.
OpTopNET: A Learning Optimal Topology Synthesizer for Ad-hoc Robot Networks
Jan 30, 2022



In this paper, we synthesize a machine-learning stacked ensemble model a vector of which predicts the optimal topology of a robot network. This problem is technically a multi-task classification problem. However, we divide it into a class of multi-class classification problems that can be more efficiently solved. For this purpose, we first compose an algorithm to create ground-truth topologies associated with various configurations of a robot network. This algorithm incorporates a complex collection of nonlinear optimality criteria that our learning model successfully manages to learn. Then, we propose a stacked ensemble model whose output is the topology prediction for the particular robot associated with it. Each stacked ensemble instance constitutes three low-level estimators whose outputs will be aggregated by a high-level boosting blender. The results of the simulations, applying our model to a network of 10 robots, represents over %80 accuracy in the prediction of optimal topologies corresponding to various configurations of this complex optimal topology learning problem.
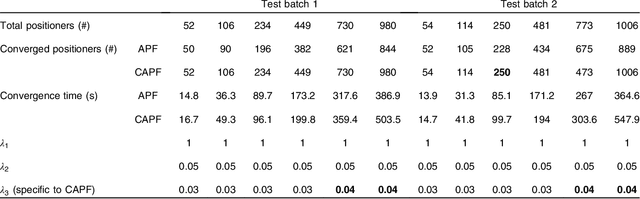
Experimental evaluation of complete safe coordination of astrobots for Sloan Digital Sky Survey V
Dec 19, 2020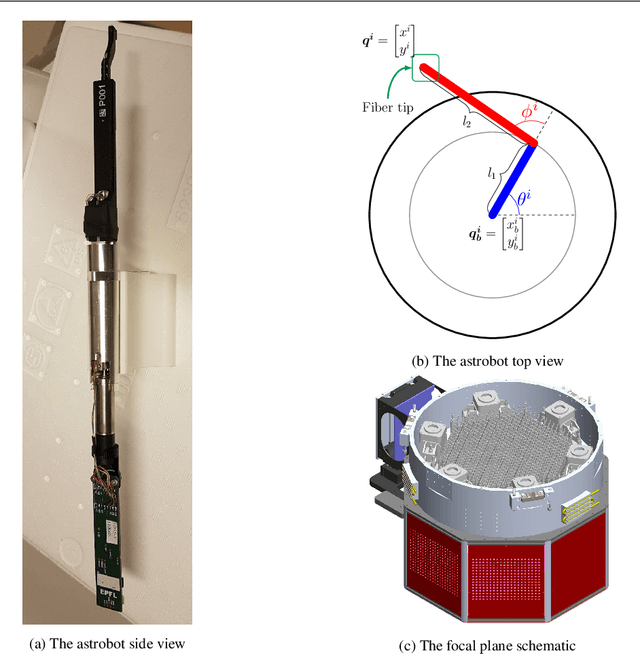

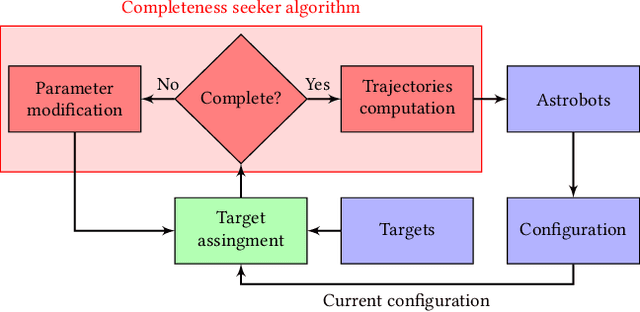
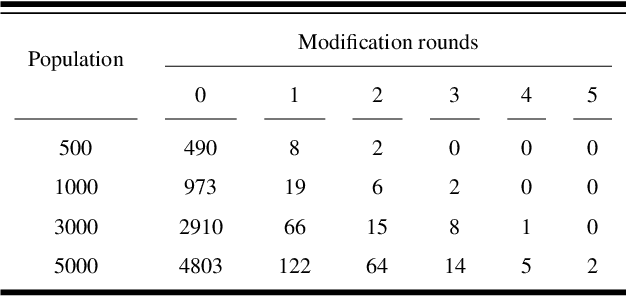
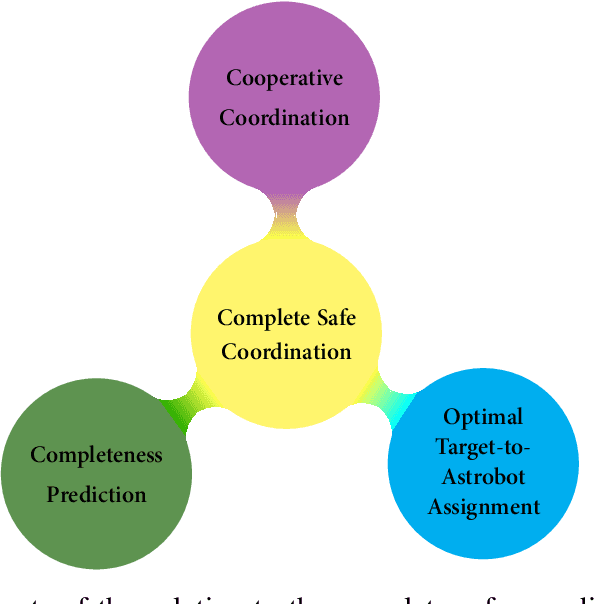
The data throughput of massive spectroscopic surveys in the course of each observation is directly coordinated with the number of optical fibers which reach their target. In this paper, we evaluate the safety and the performance of the astrobots coordination in SDSS-V by conducting various experimental and simulated tests. We illustrate that our strategy provides a complete coordination condition which depends on the operational characteristics of astrobots, their configurations, and their targets. Namely, a coordination method based on the notion of cooperative artificial potential fields is used to generate safe and complete trajectories for astrobots. Optimal target assignment further improves the performance of the used algorithm in terms of faster convergences and less oscillatory movements. Both random targets and galaxy catalog targets are employed to observe the coordination success of the algorithm in various target distributions. The proposed method is capable of handling all potential collisions in the course of coordination. Once the completeness condition is fulfilled according to initial configuration of astrobots and their targets, the algorithm reaches full convergence of astrobots. Should one assign targets to astrobots using efficient strategies, convergence time as well as the number of oscillations decrease in the course of coordination. Rare incomplete scenarios are simply resolved by trivial modifications of astrobots swarms' parameters.
* https://link.springer.com/article/10.1007/s10686-020-09687-4
Data-Driven Convergence Prediction of Astrobots Swarms
May 29, 2020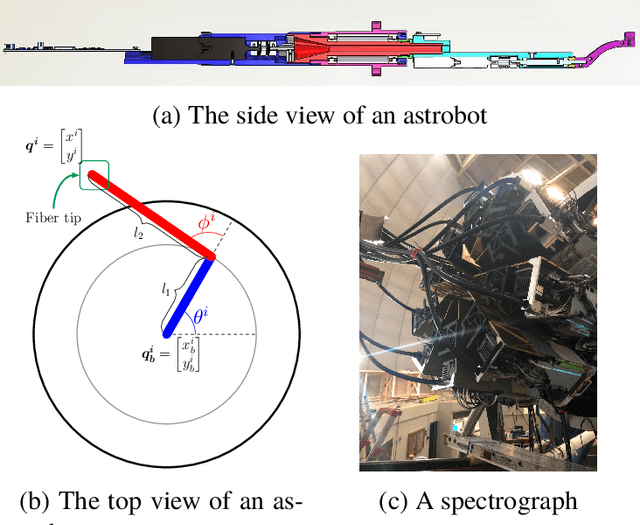
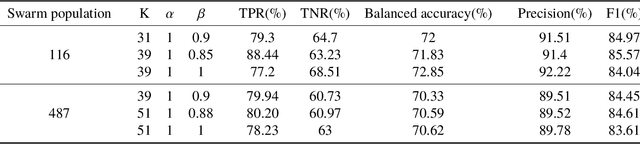
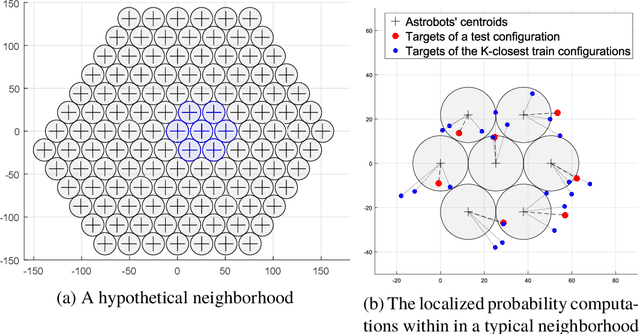
Astrobots are robotic artifacts whose swarms are used in astrophysical studies to generate the map of the observable universe. These swarms have to be coordinated with respect to various desired observations. Such coordination are so complicated that distributed swarm controllers cannot always coordinate enough astrobots to fulfill the minimum data desired to be obtained in the course of observations. Thus, a convergence verification is necessary to check the suitability of a coordination before its execution. However, a formal verification method does not exist for this purpose. In this paper, we instead use machine learning to predict the convergence of astrobots swarm. In particular, we propose a weighted $k$-NN-based algorithm which requires the initial status of a swarm as well as its observational targets to predict its convergence. Our algorithm learns to predict based on the coordination data obtained from previous coordination of the desired swarm. This method first generates a convergence probability for each astrobot based on a distance metric. Then, these probabilities are transformed to either a complete or an incomplete categorical result. The method is applied to two typical swarms including 116 and 487 astrobots. It turns out that the correct prediction of successful coordination may be up to 80% of overall predictions. Thus, these results witness the efficient accuracy of our predictive convergence analysis strategy.
Complete coordination of robotic fiber positioners for massive spectroscopic surveys
May 21, 2020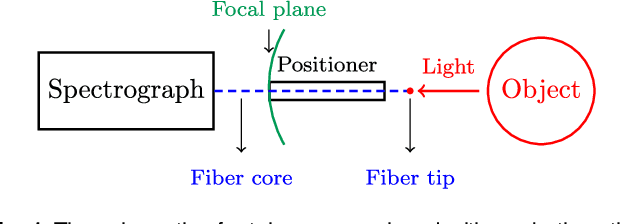
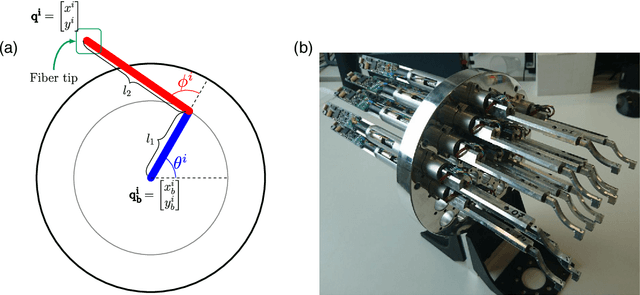
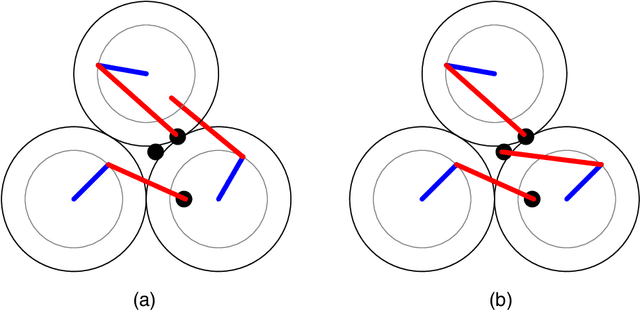
Robotic fiber positioners play a vital role in the generation of massive spectroscopic surveys. The more complete a positioners set is coordinated, the more information its corresponding spectrograph receives during an observation. The complete coordination problem of positioners sets is studied in this paper. We first define the local and the global completeness problems and determine their relationship. We then propose a new artificial potential field according to which the convergences of a positioner and its neighboring positioners are cooperatively taken into account. We also discover the required condition for a complete coordination. We finally explain how the modifications of some of the parameters of a positioners set may resolve its incompleteness coordination scenarios. We verify our accomplishments using simulations.