 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTopology Recoverability Prediction for Ad-Hoc Robot Networks: A Data-Driven Fault-Tolerant Approach
Paper and Code
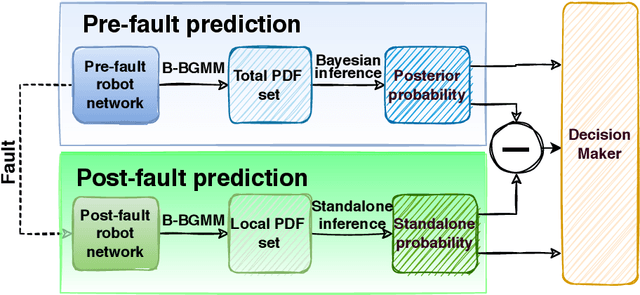
Faults occurring in ad-hoc robot networks may fatally perturb their topologies leading to disconnection of subsets of those networks. Optimal topology synthesis is generally resource-intensive and time-consuming to be done in real time for large ad-hoc robot networks. One should only perform topology re-computations if the probability of topology recoverability after the occurrence of any fault surpasses that of its irrecoverability. We formulate this problem as a binary classification problem. Then, we develop a two-pathway data-driven model based on Bayesian Gaussian mixture models that predicts the solution to a typical problem by two different pre-fault and post-fault prediction pathways. The results, obtained by the integration of the predictions of those pathways, clearly indicate the success of our model in solving the topology (ir)recoverability prediction problem compared to the best of current strategies found in the literature.