 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeExperimental evaluation of complete safe coordination of astrobots for Sloan Digital Sky Survey V
Dec 19, 2020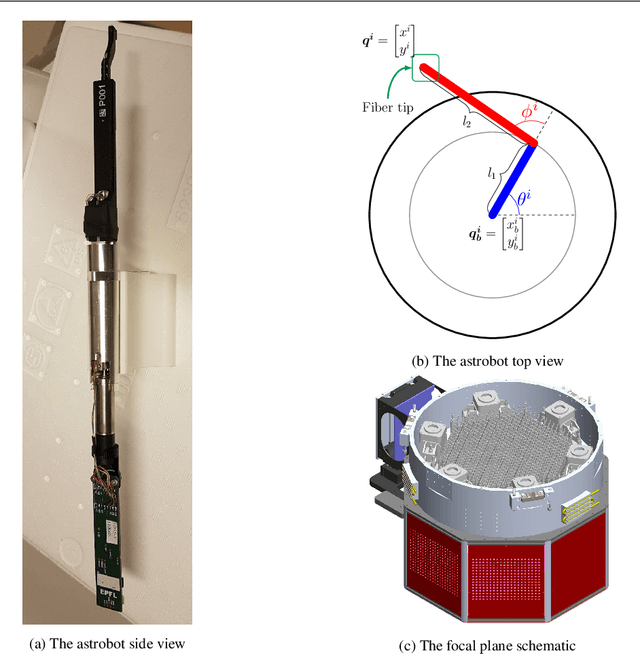

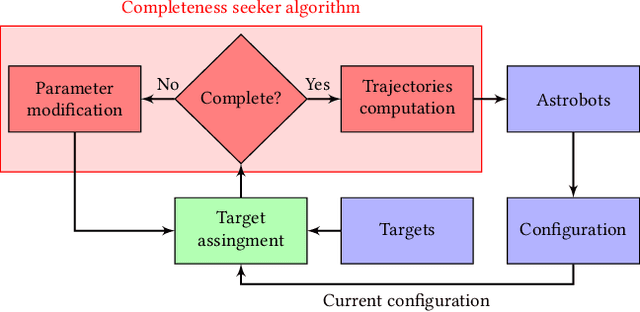
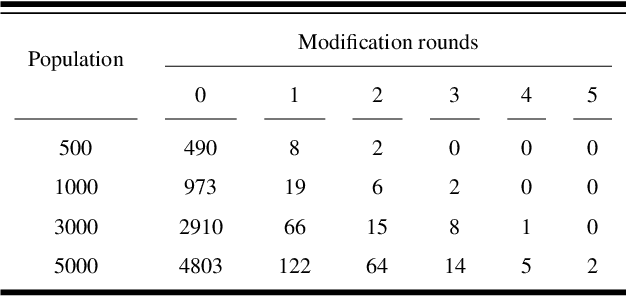
The data throughput of massive spectroscopic surveys in the course of each observation is directly coordinated with the number of optical fibers which reach their target. In this paper, we evaluate the safety and the performance of the astrobots coordination in SDSS-V by conducting various experimental and simulated tests. We illustrate that our strategy provides a complete coordination condition which depends on the operational characteristics of astrobots, their configurations, and their targets. Namely, a coordination method based on the notion of cooperative artificial potential fields is used to generate safe and complete trajectories for astrobots. Optimal target assignment further improves the performance of the used algorithm in terms of faster convergences and less oscillatory movements. Both random targets and galaxy catalog targets are employed to observe the coordination success of the algorithm in various target distributions. The proposed method is capable of handling all potential collisions in the course of coordination. Once the completeness condition is fulfilled according to initial configuration of astrobots and their targets, the algorithm reaches full convergence of astrobots. Should one assign targets to astrobots using efficient strategies, convergence time as well as the number of oscillations decrease in the course of coordination. Rare incomplete scenarios are simply resolved by trivial modifications of astrobots swarms' parameters.
* https://link.springer.com/article/10.1007/s10686-020-09687-4
High-level robot programming based on CAD: dealing with unpredictable environments
Sep 09, 2013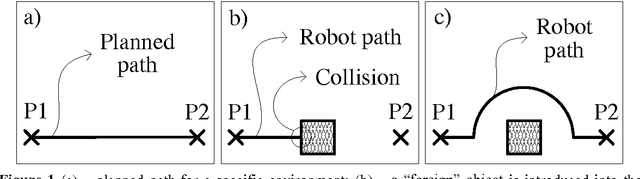
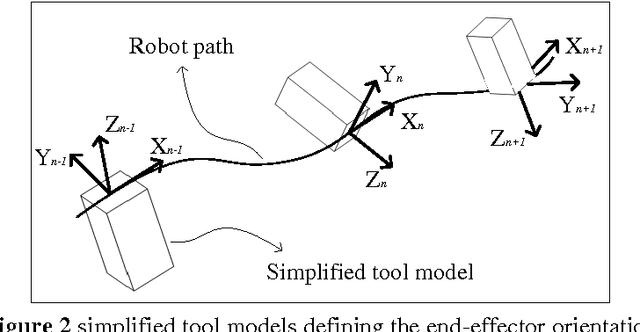
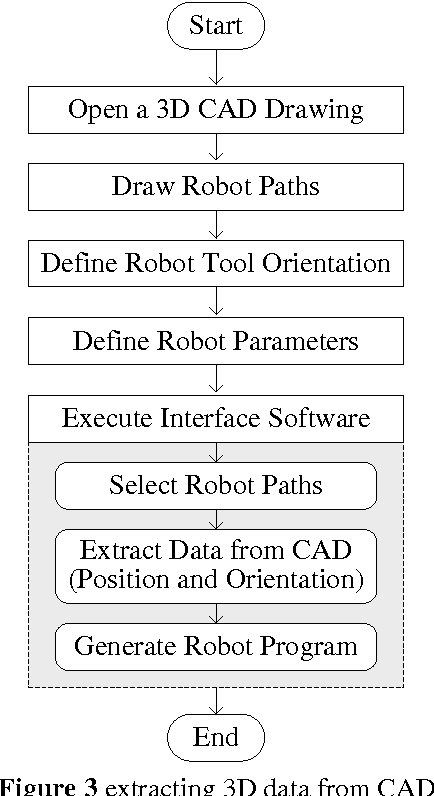
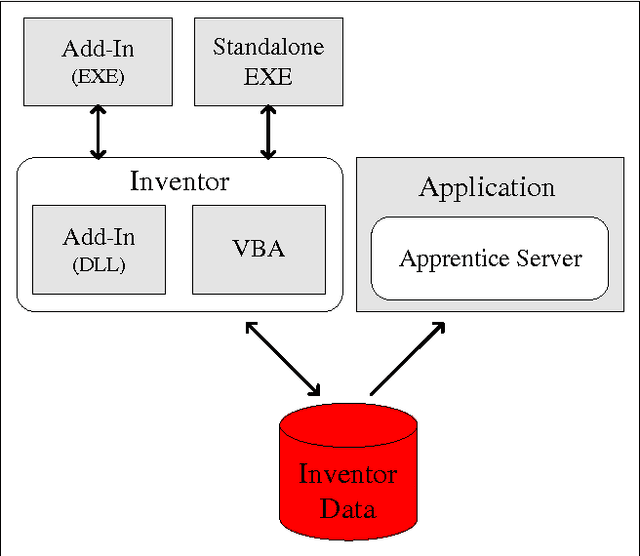
Purpose - The purpose of this paper is to present a CAD-based human-robot interface that allows non-expert users to teach a robot in a manner similar to that used by human beings to teach each other. Design/methodology/approach - Intuitive robot programming is achieved by using CAD drawings to generate robot programs off-line. Sensory feedback allows minimization of the effects of uncertainty, providing information to adjust the robot paths during robot operation. Findings - It was found that it is possible to generate a robot program from a common CAD drawing and run it without any major concerns about calibration or CAD model accuracy. Research limitations/implications - A limitation of the proposed system has to do with the fact that it was designed to be used for particular technological applications. Practical implications - Since most manufacturing companies have CAD packages in their facilities today, CAD-based robot programming may be a good option to program robots without the need for skilled robot programmers. Originality/value - The paper proposes a new CAD-based robot programming system. Robot programs are directly generated from a CAD drawing running on a commonly available 3D CAD package (Autodesk Inventor) and not from a commercial, computer aided robotics (CAR) software, making it a simple CAD integrated solution. This is a low-cost and low-setup time system where no advanced robot programming skills are required to operate it. In summary, robot programs are generated with a high-level of abstraction from the robot language.
* Industrial Robot: An International Journal