 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHigh-level robot programming based on CAD: dealing with unpredictable environments
Sep 09, 2013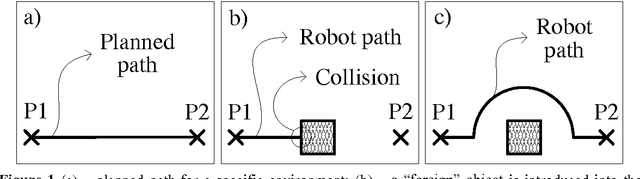
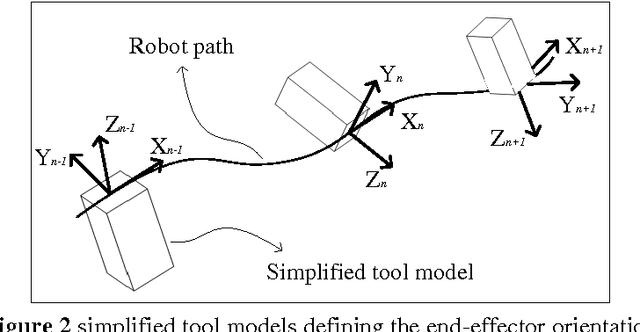
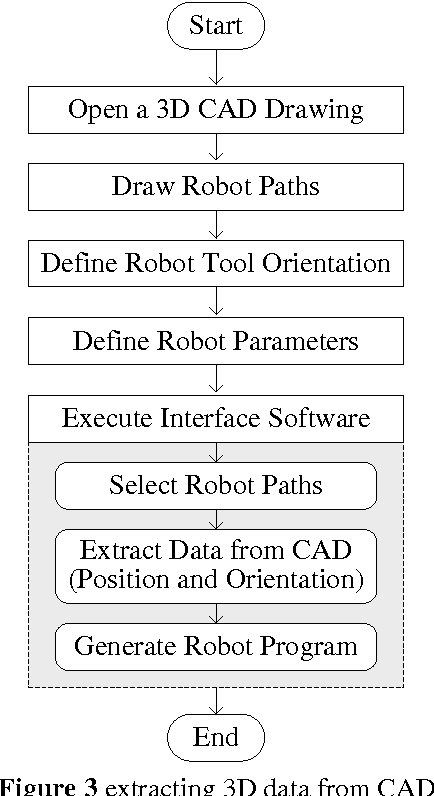
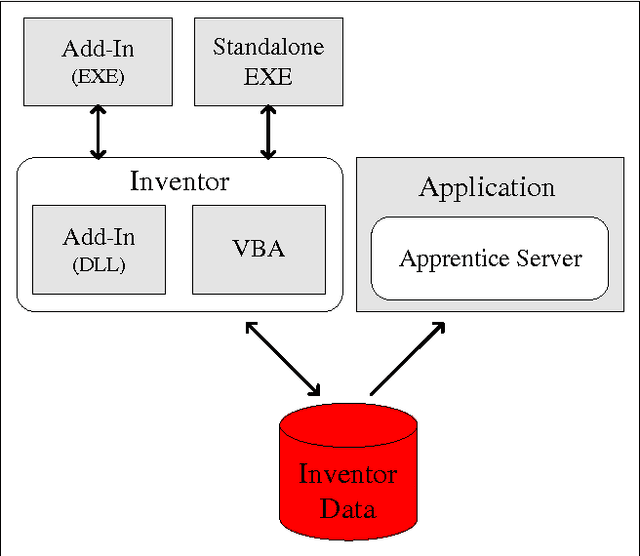
Purpose - The purpose of this paper is to present a CAD-based human-robot interface that allows non-expert users to teach a robot in a manner similar to that used by human beings to teach each other. Design/methodology/approach - Intuitive robot programming is achieved by using CAD drawings to generate robot programs off-line. Sensory feedback allows minimization of the effects of uncertainty, providing information to adjust the robot paths during robot operation. Findings - It was found that it is possible to generate a robot program from a common CAD drawing and run it without any major concerns about calibration or CAD model accuracy. Research limitations/implications - A limitation of the proposed system has to do with the fact that it was designed to be used for particular technological applications. Practical implications - Since most manufacturing companies have CAD packages in their facilities today, CAD-based robot programming may be a good option to program robots without the need for skilled robot programmers. Originality/value - The paper proposes a new CAD-based robot programming system. Robot programs are directly generated from a CAD drawing running on a commonly available 3D CAD package (Autodesk Inventor) and not from a commercial, computer aided robotics (CAR) software, making it a simple CAD integrated solution. This is a low-cost and low-setup time system where no advanced robot programming skills are required to operate it. In summary, robot programs are generated with a high-level of abstraction from the robot language.
* Industrial Robot: An International Journal
An optimal fuzzy-PI force/motion controller to increase industrial robot autonomy
Sep 09, 2013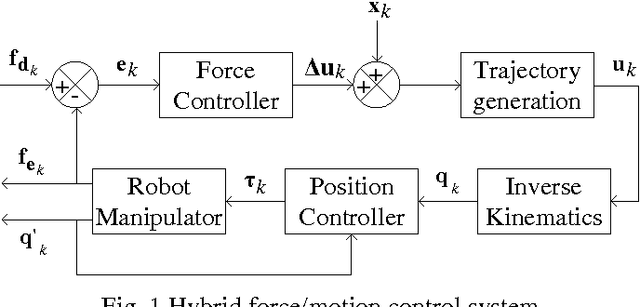
This paper presents a method for robot self-recognition and self-adaptation through the analysis of the contact between the robot end effector and its surrounding environment. Often, in off-line robot programming, the idealized robotic environment (the virtual one) does not reflect accurately the real one. In this situation, we are in the presence of a partially unknown environment (PUE). Thus, robotic systems must have some degree of autonomy to overcome this situation, especially when contact exists. The proposed force/motion control system has an external control loop based on forces and torques exerted on the robot end effector and an internal control loop based on robot motion. The external control loop is tested with an optimal proportional integrative (PI) and a fuzzy-PI controller. The system performance is validated with real-world experiments involving contact in PUEs.