 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMuPNet: Multi-modal Predictive Coding Network for Place Recognition by Unsupervised Learning of Joint Visuo-Tactile Latent Representations
Sep 16, 2019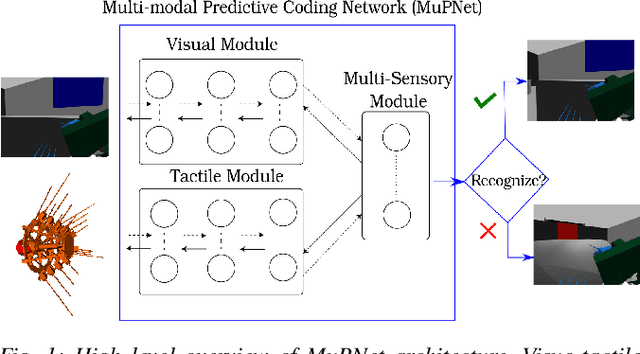
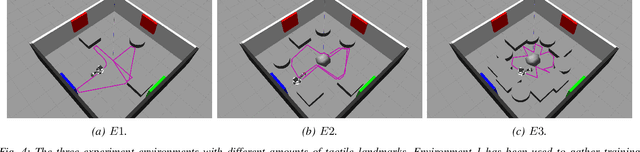
Extracting and binding salient information from different sensory modalities to determine common features in the environment is a significant challenge in robotics. Here we present MuPNet (Multi-modal Predictive Coding Network), a biologically plausible network architecture for extracting joint latent features from visuo-tactile sensory data gathered from a biomimetic mobile robot. In this study we evaluate MuPNet applied to place recognition as a simulated biomimetic robot platform explores visually aliased environments. The F1 scores demonstrate that its performance over prior hand-crafted sensory feature extraction techniques is equivalent under controlled conditions, with significant improvement when operating in novel environments.
ViTa-SLAM: A Bio-inspired Visuo-Tactile SLAM for Navigation while Interacting with Aliased Environments
Jun 26, 2019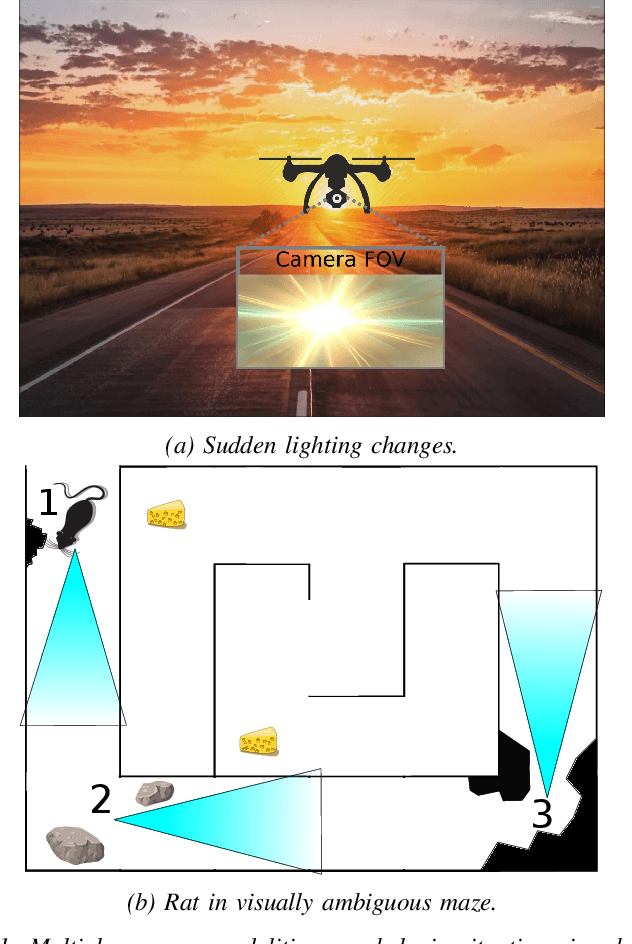
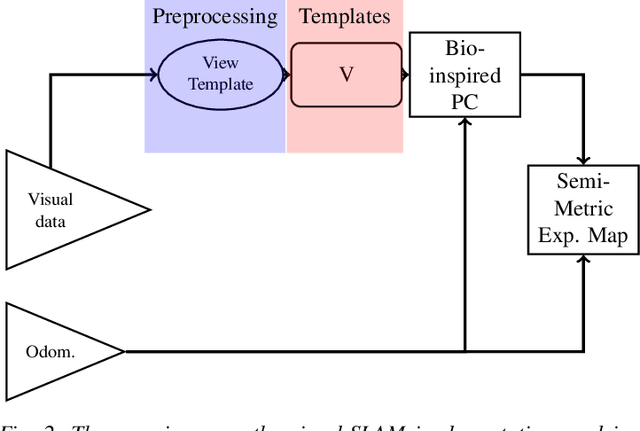

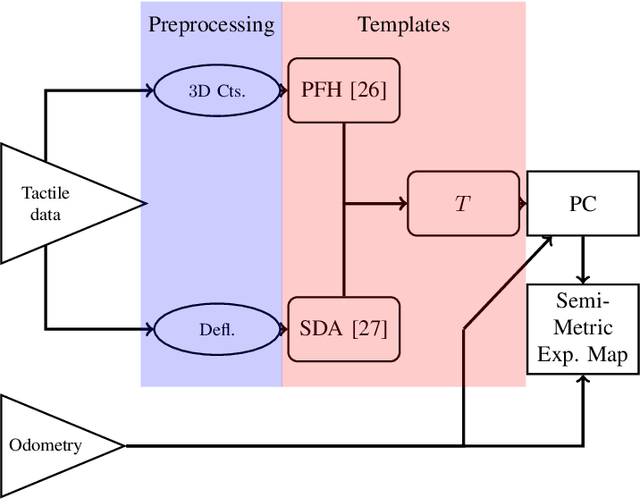
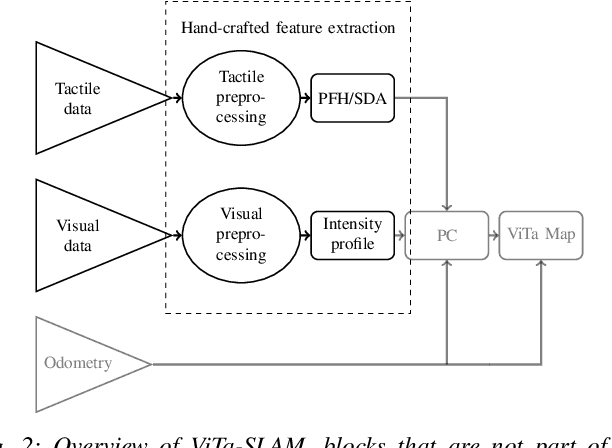
RatSLAM is a rat hippocampus-inspired visual Simultaneous Localization and Mapping (SLAM) framework capable of generating semi-metric topological representations of indoor and outdoor environments. Whisker-RatSLAM is a 6D extension of the RatSLAM and primarily focuses on object recognition by generating point clouds of objects based on whisking information. This paper introduces a novel extension to both former works that is referred to as ViTa-SLAM that harnesses both vision and tactile information for performing SLAM. This not only allows the robot to perform natural interaction with the environment whilst navigating, as is normally seen in nature, but also provides a mechanism to fuse non-unique tactile and unique visual data. Compared to the former works, our approach can handle ambiguous scenes in which one sensor alone is not capable of identifying false-positive loop-closures.
ViTa-SLAM: Biologically-Inspired Visuo-Tactile SLAM
May 14, 2019
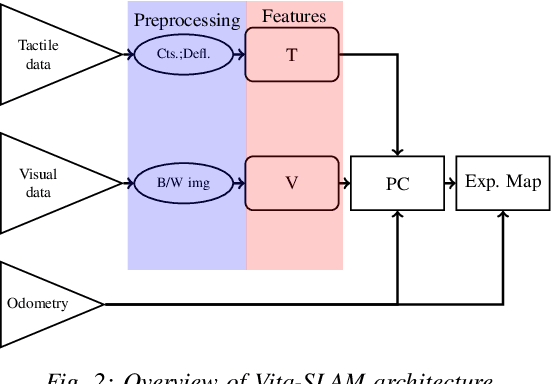
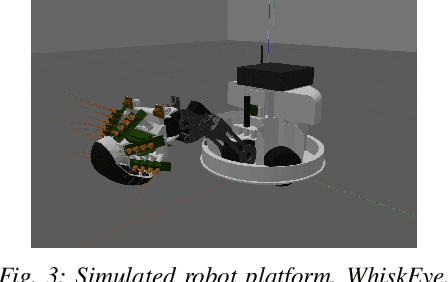
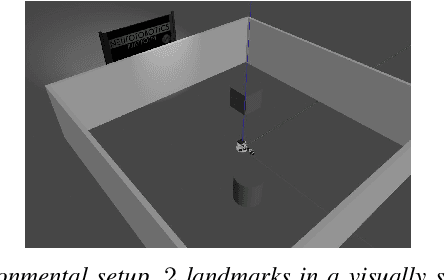
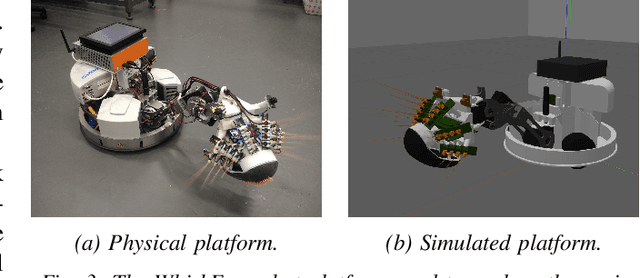
In this work, we propose a novel, bio-inspired multi-sensory SLAM approach called ViTa-SLAM. Compared to other multisensory SLAM variants, this approach allows for a seamless multi-sensory information fusion whilst naturally interacting with the environment. The algorithm is empirically evaluated in a simulated setting using a biomimetic robot platform called the WhiskEye. Our results show promising performance enhancements over existing bio-inspired SLAM approaches in terms of loop-closure detection.