 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeShaft-integrated Force Sensing with Transformer-based Dynamics Compensation for Telesurgery
May 29, 2026Robot-Assisted Minimally Invasive Surgery (RAMIS) enhances surgeon dexterity, with newer platforms leveraging haptic feedback to further improve performance. Such force information has broader potential to inform performance assessment, tactile localization, and surgical autonomy. This motivates the need for accessible approaches to integrating force sensing into RAMIS tools. This work presents a method for integrating a six-axis commercial force sensor into the distal end of a standard cable-driven surgical instrument, enabling end-effector force measurement while preserving the original mechanical functionality of the device. The proposed design emphasizes reproducibility and accessibility for research applications, requiring no specialized manufacturing tools. A transformer neural network integrates force sensor measurements with robot state information to aid estimation of applied forces at the end-effector, compensating for internal cable forces arising from actuation. Our proposed approach achieved normalized errors below 6%, and generalized to unseen conditions better than purely proximal data-driven sensing approaches. High internal cable forces caused sensor saturation and reduced axial force observability, which can degrade performance along the tool's major axis and under higher load conditions. Given current levels of performance, the balance of system integrability and performance enables applications and research into timely topics of haptic feedback, skill assessment, and force-informed autonomy in RAMIS. Videos and code are available at https://enhanced-telerobotics.github.io/shaft force sensing.
DISC: Dense Integrated Semantic Context for Large-Scale Open-Set Semantic Mapping
Mar 04, 2026Open-set semantic mapping enables language-driven robotic perception, but current instance-centric approaches are bottlenecked by context-depriving and computationally expensive crop-based feature extraction. To overcome this fundamental limitation, we introduce DISC (Dense Integrated Semantic Context), featuring a novel single-pass, distance-weighted extraction mechanism. By deriving high-fidelity CLIP embeddings directly from the vision transformer's intermediate layers, our approach eliminates the latency and domain-shift artifacts of traditional image cropping, yielding pure, mask-aligned semantic representations. To fully leverage these features in large-scale continuous mapping, DISC is built upon a fully GPU-accelerated architecture that replaces periodic offline processing with precise, on-the-fly voxel-level instance refinement. We evaluate our approach on standard benchmarks (Replica, ScanNet) and a newly generated large-scale-mapping dataset based on Habitat-Matterport 3D (HM3DSEM) to assess scalability across complex scenes in multi-story buildings. Extensive evaluations demonstrate that DISC significantly surpasses current state-of-the-art zero-shot methods in both semantic accuracy and query retrieval, providing a robust, real-time capable framework for robotic deployment. The full source code, data generation and evaluation pipelines will be made available at https://github.com/DFKI-NI/DISC.
Agentic AI for Robot Control: Flexible but still Fragile
Feb 13, 2026Recent work leverages the capabilities and commonsense priors of generative models for robot control. In this paper, we present an agentic control system in which a reasoning-capable language model plans and executes tasks by selecting and invoking robot skills within an iterative planner and executor loop. We deploy the system on two physical robot platforms in two settings: (i) tabletop grasping, placement, and box insertion in indoor mobile manipulation (Mobipick) and (ii) autonomous agricultural navigation and sensing (Valdemar). Both settings involve uncertainty, partial observability, sensor noise, and ambiguous natural-language commands. The system exposes structured introspection of its planning and decision process, reacts to exogenous events via explicit event checks, and supports operator interventions that modify or redirect ongoing execution. Across both platforms, our proof-of-concept experiments reveal substantial fragility, including non-deterministic suboptimal behavior, instruction-following errors, and high sensitivity to prompt specification. At the same time, the architecture is flexible: transfer to a different robot and task domain largely required updating the system prompt (domain model, affordances, and action catalogue) and re-binding the same tool interface to the platform-specific skill API.
A Scene Graph Backed Approach to Open Set Semantic Mapping
Feb 03, 2026While Open Set Semantic Mapping and 3D Semantic Scene Graphs (3DSSGs) are established paradigms in robotic perception, deploying them effectively to support high-level reasoning in large-scale, real-world environments remains a significant challenge. Most existing approaches decouple perception from representation, treating the scene graph as a derivative layer generated post hoc. This limits both consistency and scalability. In contrast, we propose a mapping architecture where the 3DSSG serves as the foundational backend, acting as the primary knowledge representation for the entire mapping process. Our approach leverages prior work on incremental scene graph prediction to infer and update the graph structure in real-time as the environment is explored. This ensures that the map remains topologically consistent and computationally efficient, even during extended operations in large-scale settings. By maintaining an explicit, spatially grounded representation that supports both flat and hierarchical topologies, we bridge the gap between sub-symbolic raw sensor data and high-level symbolic reasoning. Consequently, this provides a stable, verifiable structure that knowledge-driven frameworks, ranging from knowledge graphs and ontologies to Large Language Models (LLMs), can directly exploit, enabling agents to operate with enhanced interpretability, trustworthiness, and alignment to human concepts.
LIEREx: Language-Image Embeddings for Robotic Exploration
Feb 02, 2026Semantic maps allow a robot to reason about its surroundings to fulfill tasks such as navigating known environments, finding specific objects, and exploring unmapped areas. Traditional mapping approaches provide accurate geometric representations but are often constrained by pre-designed symbolic vocabularies. The reliance on fixed object classes makes it impractical to handle out-of-distribution knowledge not defined at design time. Recent advances in Vision-Language Foundation Models, such as CLIP, enable open-set mapping, where objects are encoded as high-dimensional embeddings rather than fixed labels. In LIEREx, we integrate these VLFMs with established 3D Semantic Scene Graphs to enable target-directed exploration by an autonomous agent in partially unknown environments.
* This preprint has not undergone peer review or any post-submission improvements or corrections. The Version of Record of this article is published in KI - Künstliche Intelligenz, and is available online at https://doi.org/10.1007/s13218-026-00902-6
ExPrIS: Knowledge-Level Expectations as Priors for Object Interpretation from Sensor Data
Jan 21, 2026While deep learning has significantly advanced robotic object recognition, purely data-driven approaches often lack semantic consistency and fail to leverage valuable, pre-existing knowledge about the environment. This report presents the ExPrIS project, which addresses this challenge by investigating how knowledge-level expectations can serve as to improve object interpretation from sensor data. Our approach is based on the incremental construction of a 3D Semantic Scene Graph (3DSSG). We integrate expectations from two sources: contextual priors from past observations and semantic knowledge from external graphs like ConceptNet. These are embedded into a heterogeneous Graph Neural Network (GNN) to create an expectation-biased inference process. This method moves beyond static, frame-by-frame analysis to enhance the robustness and consistency of scene understanding over time. The report details this architecture, its evaluation, and outlines its planned integration on a mobile robotic platform.
* This preprint has not undergone peer review or any post-submission improvements or corrections. The Version of Record of this article is published in KI - Künstliche Intelligenz, and is available online at https://doi.org/10.1007/s13218-026-00901-7
Saliency Map-Guided Knowledge Discovery for Subclass Identification with LLM-Based Symbolic Approximations
Nov 10, 2025This paper proposes a novel neuro-symbolic approach for sensor signal-based knowledge discovery, focusing on identifying latent subclasses in time series classification tasks. The approach leverages gradient-based saliency maps derived from trained neural networks to guide the discovery process. Multiclass time series classification problems are transformed into binary classification problems through label subsumption, and classifiers are trained for each of these to yield saliency maps. The input signals, grouped by predicted class, are clustered under three distinct configurations. The centroids of the final set of clusters are provided as input to an LLM for symbolic approximation and fuzzy knowledge graph matching to discover the underlying subclasses of the original multiclass problem. Experimental results on well-established time series classification datasets demonstrate the effectiveness of our saliency map-driven method for knowledge discovery, outperforming signal-only baselines in both clustering and subclass identification.
ProtoMask: Segmentation-Guided Prototype Learning
Oct 01, 2025


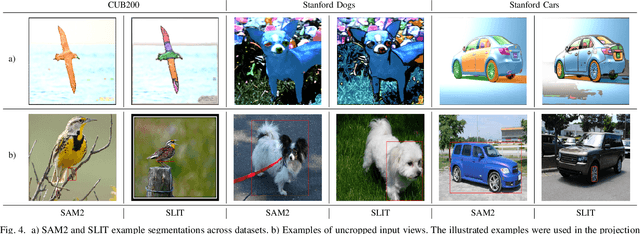
XAI gained considerable importance in recent years. Methods based on prototypical case-based reasoning have shown a promising improvement in explainability. However, these methods typically rely on additional post-hoc saliency techniques to explain the semantics of learned prototypes. Multiple critiques have been raised about the reliability and quality of such techniques. For this reason, we study the use of prominent image segmentation foundation models to improve the truthfulness of the mapping between embedding and input space. We aim to restrict the computation area of the saliency map to a predefined semantic image patch to reduce the uncertainty of such visualizations. To perceive the information of an entire image, we use the bounding box from each generated segmentation mask to crop the image. Each mask results in an individual input in our novel model architecture named ProtoMask. We conduct experiments on three popular fine-grained classification datasets with a wide set of metrics, providing a detailed overview on explainability characteristics. The comparison with other popular models demonstrates competitive performance and unique explainability features of our model. https://github.com/uos-sis/quanproto
Kriging prior Regression: A Case for Kriging-Based Spatial Features with TabPFN in Soil Mapping
Sep 11, 2025Machine learning and geostatistics are two fundamentally different frameworks for predicting and spatially mapping soil properties. Geostatistics leverages the spatial structure of soil properties, while machine learning captures the relationship between available environmental features and soil properties. We propose a hybrid framework that enriches ML with spatial context through engineering of 'spatial lag' features from ordinary kriging. We call this approach 'kriging prior regression' (KpR), as it follows the inverse logic of regression kriging. To evaluate this approach, we assessed both the point and probabilistic prediction performance of KpR, using the TabPFN model across six fieldscale datasets from LimeSoDa. These datasets included soil organic carbon, clay content, and pH, along with features derived from remote sensing and in-situ proximal soil sensing. KpR with TabPFN demonstrated reliable uncertainty estimates and more accurate predictions in comparison to several other spatial techniques (e.g., regression/residual kriging with TabPFN), as well as to established non-spatial machine learning algorithms (e.g., random forest). Most notably, it significantly improved the average R2 by around 30% compared to machine learning algorithms without spatial context. This improvement was due to the strong prediction performance of the TabPFN algorithm itself and the complementary spatial information provided by KpR features. TabPFN is particularly effective for prediction tasks with small sample sizes, common in precision agriculture, whereas KpR can compensate for weak relationships between sensing features and soil properties when proximal soil sensing data are limited. Hence, we conclude that KpR with TabPFN is a very robust and versatile modelling framework for digital soil mapping in precision agriculture.
Modern Neural Networks for Small Tabular Datasets: The New Default for Field-Scale Digital Soil Mapping?
Aug 13, 2025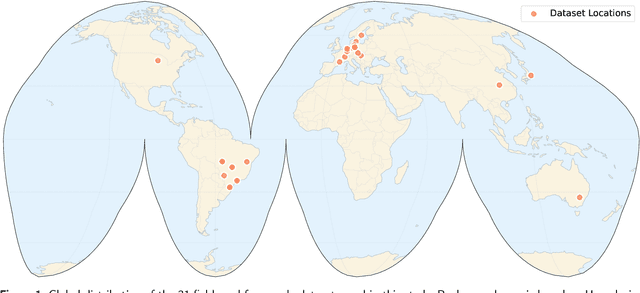
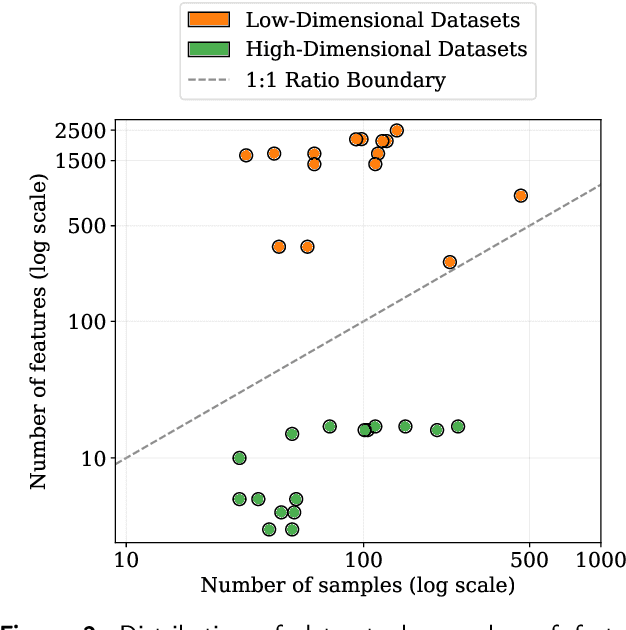
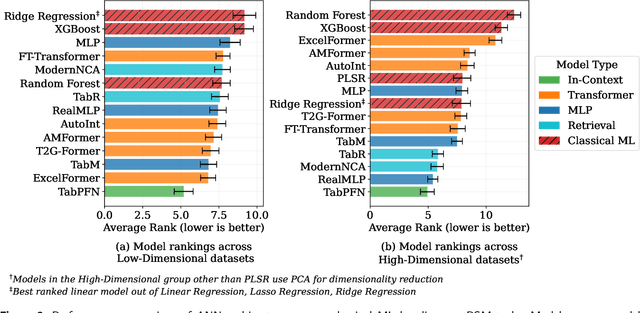

In the field of pedometrics, tabular machine learning is the predominant method for predicting soil properties from remote and proximal soil sensing data, forming a central component of digital soil mapping. At the field-scale, this predictive soil modeling (PSM) task is typically constrained by small training sample sizes and high feature-to-sample ratios in soil spectroscopy. Traditionally, these conditions have proven challenging for conventional deep learning methods. Classical machine learning algorithms, particularly tree-based models like Random Forest and linear models such as Partial Least Squares Regression, have long been the default choice for field-scale PSM. Recent advances in artificial neural networks (ANN) for tabular data challenge this view, yet their suitability for field-scale PSM has not been proven. We introduce a comprehensive benchmark that evaluates state-of-the-art ANN architectures, including the latest multilayer perceptron (MLP)-based models (TabM, RealMLP), attention-based transformer variants (FT-Transformer, ExcelFormer, T2G-Former, AMFormer), retrieval-augmented approaches (TabR, ModernNCA), and an in-context learning foundation model (TabPFN). Our evaluation encompasses 31 field- and farm-scale datasets containing 30 to 460 samples and three critical soil properties: soil organic matter or soil organic carbon, pH, and clay content. Our results reveal that modern ANNs consistently outperform classical methods on the majority of tasks, demonstrating that deep learning has matured sufficiently to overcome the long-standing dominance of classical machine learning for PSM. Notably, TabPFN delivers the strongest overall performance, showing robustness across varying conditions. We therefore recommend the adoption of modern ANNs for field-scale PSM and propose TabPFN as the new default choice in the toolkit of every pedometrician.