 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeExploring the Dynamics between Cobot's Production Rhythm, Locus of Control and Emotional State in a Collaborative Assembly Scenario
Feb 01, 2024In industrial scenarios, there is widespread use of collaborative robots (cobots), and growing interest is directed at evaluating and measuring the impact of some characteristics of the cobot on the human factor. In the present pilot study, the effect that the production rhythm (C1 - Slow, C2 - Fast, C3 - Adapted to the participant's pace) of a cobot has on the Experiential Locus of Control (ELoC) and the emotional state of 31 participants has been examined. The operators' performance, the degree of basic internal Locus of Control, and the attitude towards the robots were also considered. No difference was found regarding the emotional state and the ELoC in the three conditions, but considering the other psychological variables, a more complex situation emerges. Overall, results seem to indicate a need to consider the person's psychological characteristics to offer a differentiated and optimal interaction experience.
Gaze Detection and Analysis for Initiating Joint Activity in Industrial Human-Robot Collaboration
Dec 12, 2023



Collaborative robots (cobots) are widely used in industrial applications, yet extensive research is still needed to enhance human-robot collaborations and operator experience. A potential approach to improve the collaboration experience involves adapting cobot behavior based on natural cues from the operator. Inspired by the literature on human-human interactions, we conducted a wizard-of-oz study to examine whether a gaze towards the cobot can serve as a trigger for initiating joint activities in collaborative sessions. In this study, 37 participants engaged in an assembly task while their gaze behavior was analyzed. We employ a gaze-based attention recognition model to identify when the participants look at the cobot. Our results indicate that in most cases (84.88\%), the joint activity is preceded by a gaze towards the cobot. Furthermore, during the entire assembly cycle, the participants tend to look at the cobot around the time of the joint activity. To the best of our knowledge, this is the first study to analyze the natural gaze behavior of participants working on a joint activity with a robot during a collaborative assembly task.
Experience in Engineering Complex Systems: Active Preference Learning with Multiple Outcomes and Certainty Levels
Feb 27, 2023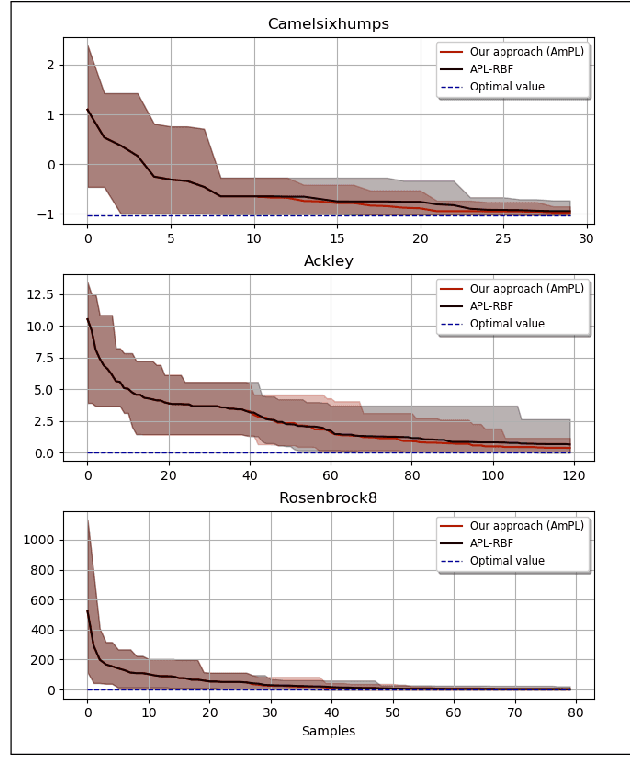
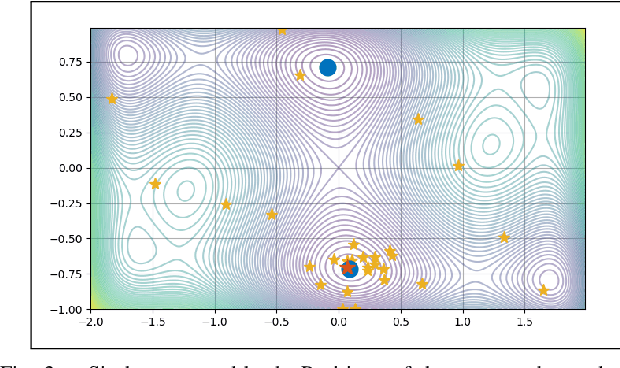
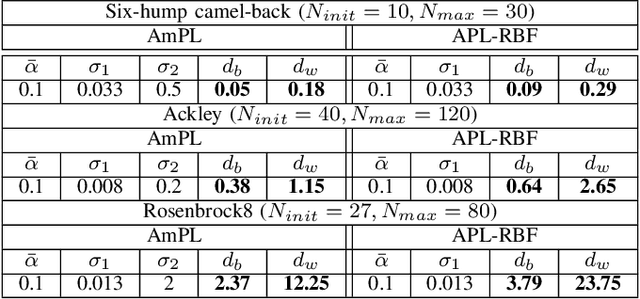
Black-box optimization refers to the optimization problem whose objective function and/or constraint sets are either unknown, inaccessible, or non-existent. In many applications, especially with the involvement of humans, the only way to access the optimization problem is through performing physical experiments with the available outcomes being the preference of one candidate with respect to one or many others. Accordingly, the algorithm so-called Active Preference Learning has been developed to exploit this specific information in constructing a surrogate function based on standard radial basis functions, and then forming an easy-to-solve acquisition function which repetitively suggests new decision vectors to search for the optimal solution. Based on this idea, our approach aims to extend the algorithm in such a way that can exploit further information effectively, which can be obtained in reality such as: 5-point Likert type scale for the outcomes of the preference query (i.e., the preference can be described in not only "this is better than that" but also "this is much better than that" level), or multiple outcomes for a single preference query with possible additive information on how certain the outcomes are. The validation of the proposed algorithm is done through some standard benchmark functions, showing a promising improvement with respect to the state-of-the-art algorithm.