 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTowards Packaging Unit Detection for Automated Palletizing Tasks
Aug 11, 2023For various automated palletizing tasks, the detection of packaging units is a crucial step preceding the actual handling of the packaging units by an industrial robot. We propose an approach to this challenging problem that is fully trained on synthetically generated data and can be robustly applied to arbitrary real world packaging units without further training or setup effort. The proposed approach is able to handle sparse and low quality sensor data, can exploit prior knowledge if available and generalizes well to a wide range of products and application scenarios. To demonstrate the practical use of our approach, we conduct an extensive evaluation on real-world data with a wide range of different retail products. Further, we integrated our approach in a lab demonstrator and a commercial solution will be marketed through an industrial partner.
Investigations on Output Parameterizations of Neural Networks for Single Shot 6D Object Pose Estimation
Apr 15, 2021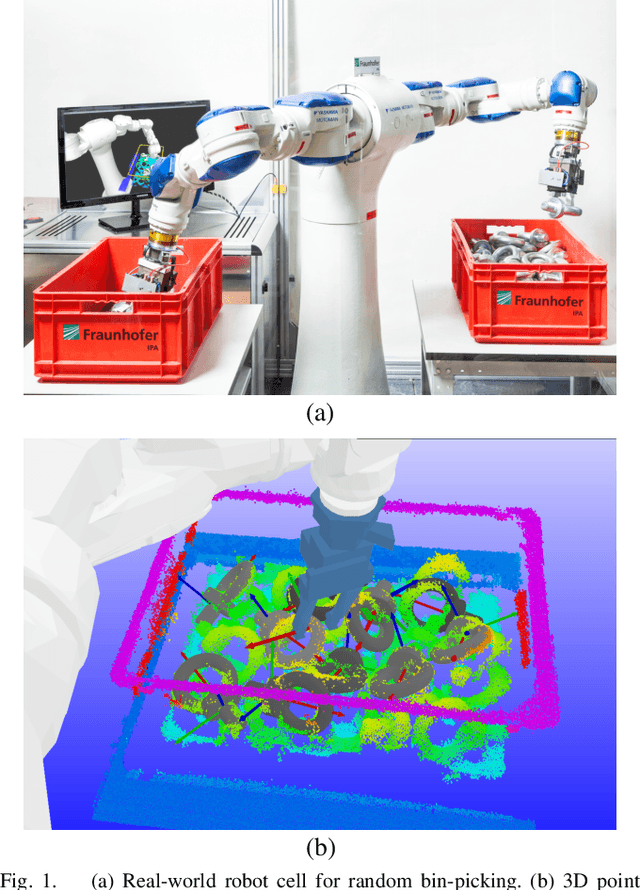
Single shot approaches have demonstrated tremendous success on various computer vision tasks. Finding good parameterizations for 6D object pose estimation remains an open challenge. In this work, we propose different novel parameterizations for the output of the neural network for single shot 6D object pose estimation. Our learning-based approach achieves state-of-the-art performance on two public benchmark datasets. Furthermore, we demonstrate that the pose estimates can be used for real-world robotic grasping tasks without additional ICP refinement.
Transferring Experience from Simulation to the Real World for Precise Pick-And-Place Tasks in Highly Cluttered Scenes
Jan 12, 2021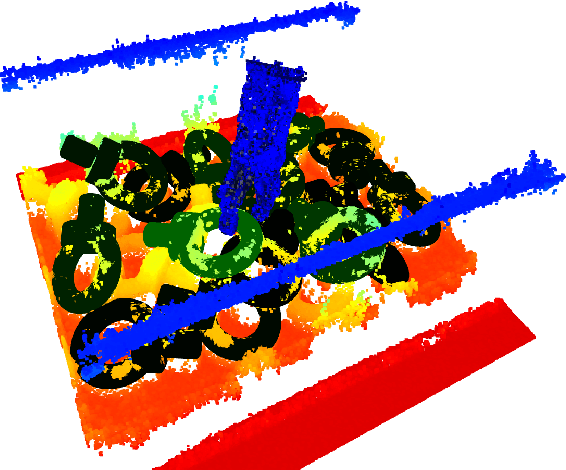
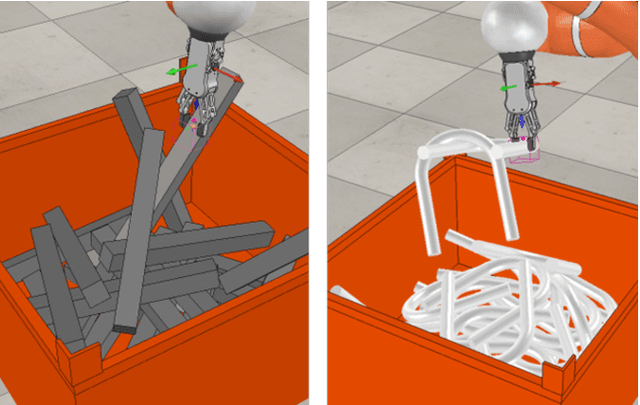
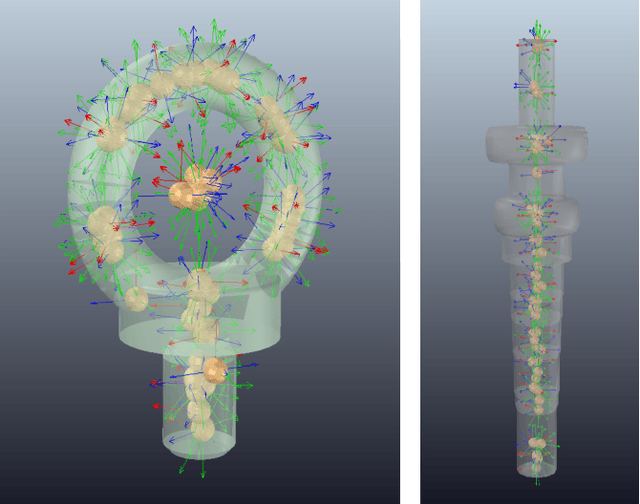
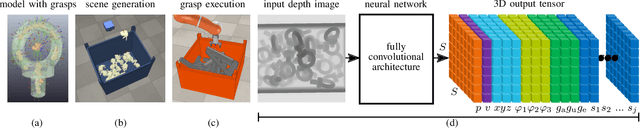
In this paper, we introduce a novel learning-based approach for grasping known rigid objects in highly cluttered scenes and precisely placing them based on depth images. Our Placement Quality Network (PQ-Net) estimates the object pose and the quality for each automatically generated grasp pose for multiple objects simultaneously at 92 fps in a single forward pass of a neural network. All grasping and placement trials are executed in a physics simulation and the gained experience is transferred to the real world using domain randomization. We demonstrate that our policy successfully transfers to the real world. PQ-Net outperforms other model-free approaches in terms of grasping success rate and automatically scales to new objects of arbitrary symmetry without any human intervention.