 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAutomatic Grasp Pose Generation for Parallel Jaw Grippers
Apr 23, 2021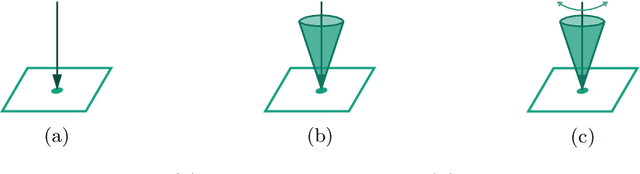
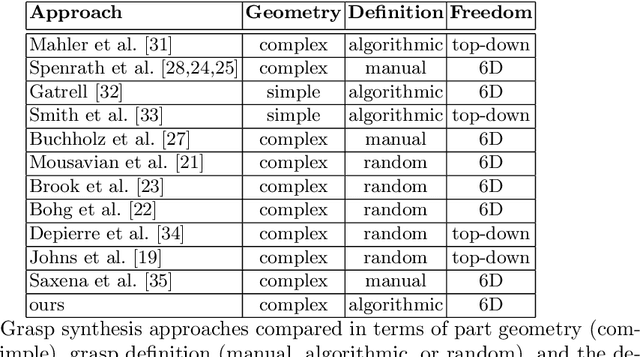


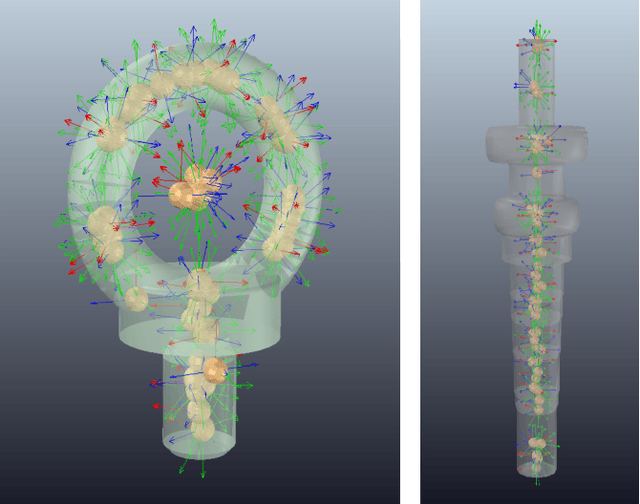
This paper presents a novel approach for the automatic offline grasp pose synthesis on known rigid objects for parallel jaw grippers. We use several criteria such as gripper stroke, surface friction, and a collision check to determine suitable 6D grasp poses on an object. In contrast to most available approaches, we neither aim for the best grasp pose nor for as many grasp poses as possible, but for a highly diverse set of grasps distributed all along the object. In order to accomplish this objective, we employ a clustering algorithm to the sampled set of grasps. This allows to simultaneously reduce the set of grasp pose candidates and maintain a high variance in terms of position and orientation between the individual grasps. We demonstrate that the grasps generated by our method can be successfully used in real-world robotic grasping applications.
Transferring Experience from Simulation to the Real World for Precise Pick-And-Place Tasks in Highly Cluttered Scenes
Jan 12, 2021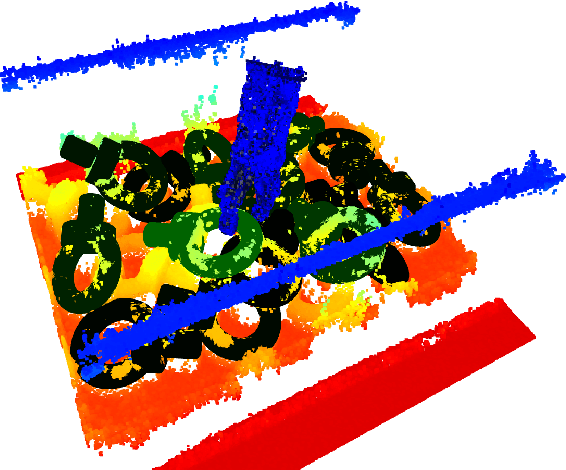
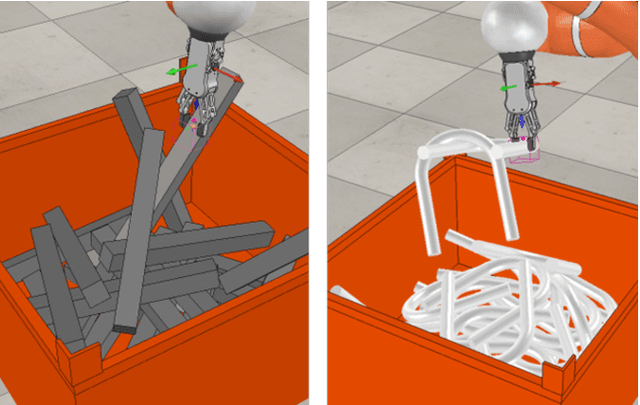
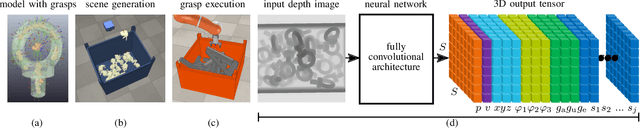
In this paper, we introduce a novel learning-based approach for grasping known rigid objects in highly cluttered scenes and precisely placing them based on depth images. Our Placement Quality Network (PQ-Net) estimates the object pose and the quality for each automatically generated grasp pose for multiple objects simultaneously at 92 fps in a single forward pass of a neural network. All grasping and placement trials are executed in a physics simulation and the gained experience is transferred to the real world using domain randomization. We demonstrate that our policy successfully transfers to the real world. PQ-Net outperforms other model-free approaches in terms of grasping success rate and automatically scales to new objects of arbitrary symmetry without any human intervention.