Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeInvestigations on Output Parameterizations of Neural Networks for Single Shot 6D Object Pose Estimation
Paper and Code
Apr 15, 2021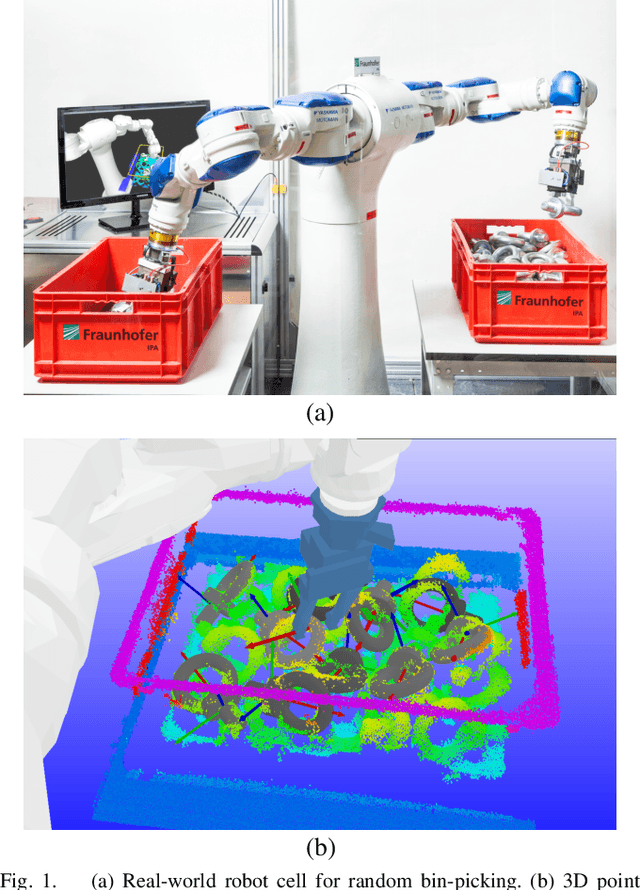
Single shot approaches have demonstrated tremendous success on various computer vision tasks. Finding good parameterizations for 6D object pose estimation remains an open challenge. In this work, we propose different novel parameterizations for the output of the neural network for single shot 6D object pose estimation. Our learning-based approach achieves state-of-the-art performance on two public benchmark datasets. Furthermore, we demonstrate that the pose estimates can be used for real-world robotic grasping tasks without additional ICP refinement.
* Accepted at 2021 IEEE International Conference on Robotics and
Automation (ICRA 2021)
View paper on