 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDeep Learning for automatic head and neck lymph node level delineation
Aug 28, 2022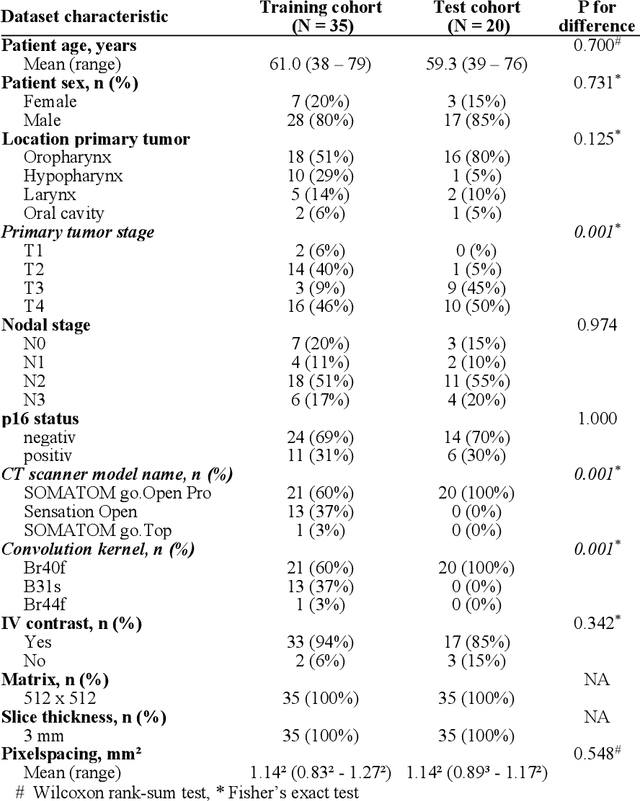
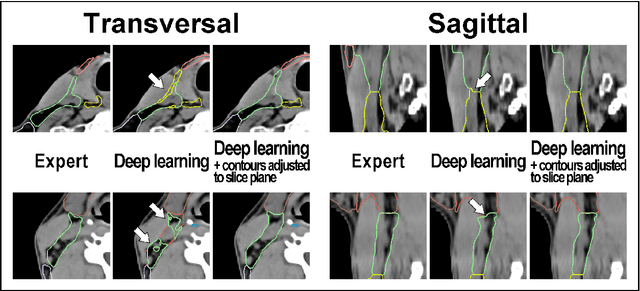
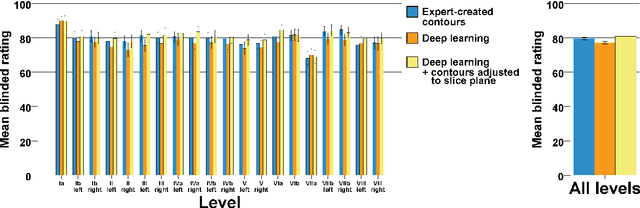
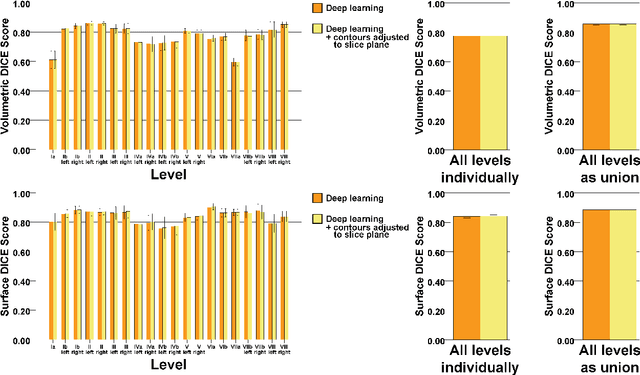
Background: Deep learning-based head and neck lymph node level (HN_LNL) autodelineation is of high relevance to radiotherapy research and clinical treatment planning but still understudied in academic literature. Methods: An expert-delineated cohort of 35 planning CTs was used for training of an nnU-net 3D-fullres/2D-ensemble model for autosegmentation of 20 different HN_LNL. Validation was performed in an independent test set (n=20). In a completely blinded evaluation, 3 clinical experts rated the quality of deep learning autosegmentations in a head-to-head comparison with expert-created contours. For a subgroup of 10 cases, intraobserver variability was compared to deep learning autosegmentation performance. The effect of autocontour consistency with CT slice plane orientation on geometric accuracy and expert rating was investigated. Results: Mean blinded expert rating per level was significantly better for deep learning segmentations with CT slice plane adjustment than for expert-created contours (81.0 vs. 79.6, p<0.001), but deep learning segmentations without slice plane adjustment were rated significantly worse than expert-created contours (77.2 vs. 79.6, p<0.001). Geometric accuracy of deep learning segmentations was non-different from intraobserver variability (mean Dice per level, 0.78 vs. 0.77, p=0.064) with variance in accuracy between levels being improved (p<0.001). Clinical significance of contour consistency with CT slice plane orientation was not represented by geometric accuracy metrics (Dice, 0.78 vs. 0.78, p=0.572) Conclusions: We show that a nnU-net 3D-fullres/2D-ensemble model can be used for highly accurate autodelineation of HN_LNL using only a limited training dataset that is ideally suited for large-scale standardized autodelineation of HN_LNL in the research setting. Geometric accuracy metrics are only an imperfect surrogate for blinded expert rating.
Deep Learning based Virtual Point Tracking for Real-Time Target-less Dynamic Displacement Measurement in Railway Applications
Jan 20, 2021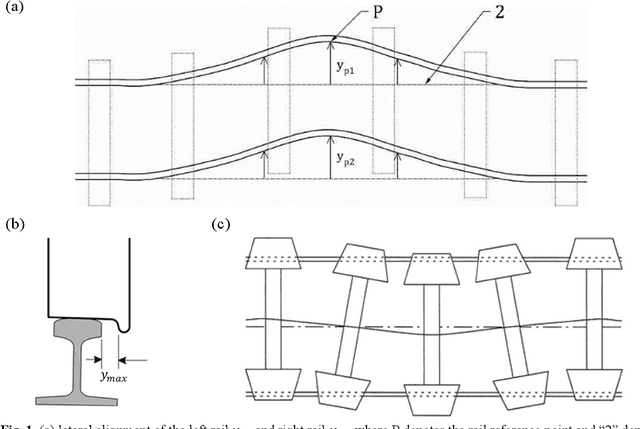
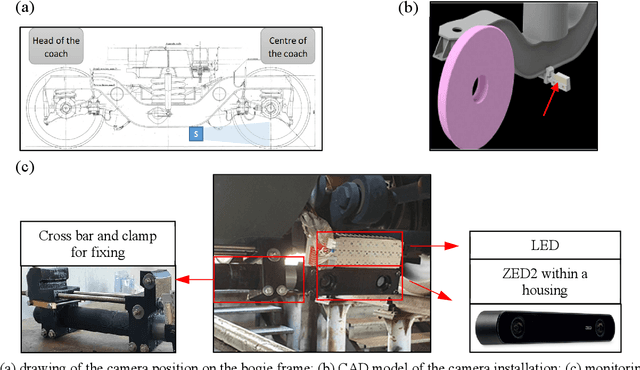
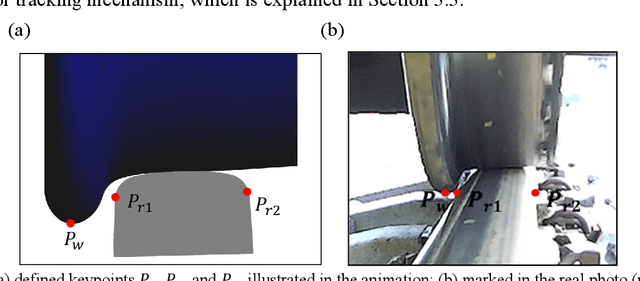
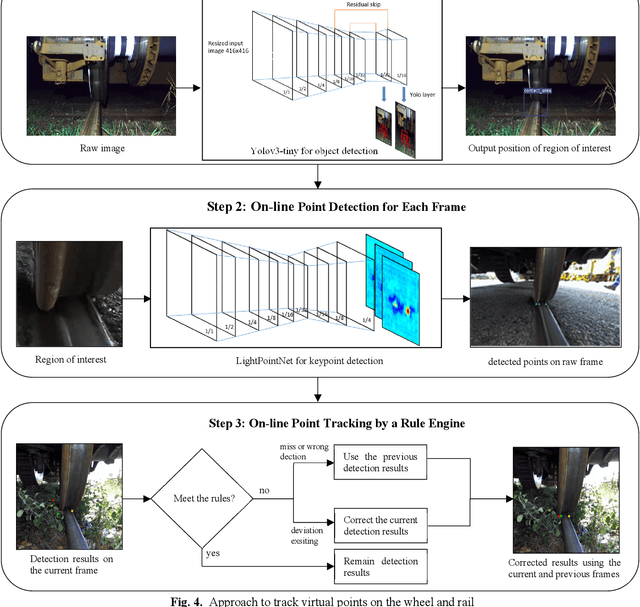
In the application of computer-vision based displacement measurement, an optical target is usually required to prove the reference. In the case that the optical target cannot be attached to the measuring objective, edge detection, feature matching and template matching are the most common approaches in target-less photogrammetry. However, their performance significantly relies on parameter settings. This becomes problematic in dynamic scenes where complicated background texture exists and varies over time. To tackle this issue, we propose virtual point tracking for real-time target-less dynamic displacement measurement, incorporating deep learning techniques and domain knowledge. Our approach consists of three steps: 1) automatic calibration for detection of region of interest; 2) virtual point detection for each video frame using deep convolutional neural network; 3) domain-knowledge based rule engine for point tracking in adjacent frames. The proposed approach can be executed on an edge computer in a real-time manner (i.e. over 30 frames per second). We demonstrate our approach for a railway application, where the lateral displacement of the wheel on the rail is measured during operation. We also implement an algorithm using template matching and line detection as the baseline for comparison. The numerical experiments have been performed to evaluate the performance and the latency of our approach in the harsh railway environment with noisy and varying backgrounds.