 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMapsTP: HD Map Images Based Multimodal Trajectory Prediction for Automated Vehicles
Jul 08, 2024



Predicting ego vehicle trajectories remains a critical challenge, especially in urban and dense areas due to the unpredictable behaviours of other vehicles and pedestrians. Multimodal trajectory prediction enhances decision-making by considering multiple possible future trajectories based on diverse sources of environmental data. In this approach, we leverage ResNet-50 to extract image features from high-definition map data and use IMU sensor data to calculate speed, acceleration, and yaw rate. A temporal probabilistic network is employed to compute potential trajectories, selecting the most accurate and highly probable trajectory paths. This method integrates HD map data to improve the robustness and reliability of trajectory predictions for autonomous vehicles.
Optimizing Ego Vehicle Trajectory Prediction: The Graph Enhancement Approach
Jan 10, 2024Predicting the trajectory of an ego vehicle is a critical component of autonomous driving systems. Current state-of-the-art methods typically rely on Deep Neural Networks (DNNs) and sequential models to process front-view images for future trajectory prediction. However, these approaches often struggle with perspective issues affecting object features in the scene. To address this, we advocate for the use of Bird's Eye View (BEV) perspectives, which offer unique advantages in capturing spatial relationships and object homogeneity. In our work, we leverage Graph Neural Networks (GNNs) and positional encoding to represent objects in a BEV, achieving competitive performance compared to traditional DNN-based methods. While the BEV-based approach loses some detailed information inherent to front-view images, we balance this by enriching the BEV data by representing it as a graph where relationships between the objects in a scene are captured effectively.
BEVSeg2TP: Surround View Camera Bird's-Eye-View Based Joint Vehicle Segmentation and Ego Vehicle Trajectory Prediction
Dec 20, 2023



Trajectory prediction is, naturally, a key task for vehicle autonomy. While the number of traffic rules is limited, the combinations and uncertainties associated with each agent's behaviour in real-world scenarios are nearly impossible to encode. Consequently, there is a growing interest in learning-based trajectory prediction. The proposed method in this paper predicts trajectories by considering perception and trajectory prediction as a unified system. In considering them as unified tasks, we show that there is the potential to improve the performance of perception. To achieve these goals, we present BEVSeg2TP - a surround-view camera bird's-eye-view-based joint vehicle segmentation and ego vehicle trajectory prediction system for autonomous vehicles. The proposed system uses a network trained on multiple camera views. The images are transformed using several deep learning techniques to perform semantic segmentation of objects, including other vehicles, in the scene. The segmentation outputs are fused across the camera views to obtain a comprehensive representation of the surrounding vehicles from the bird's-eye-view perspective. The system further predicts the future trajectory of the ego vehicle using a spatiotemporal probabilistic network (STPN) to optimize trajectory prediction. This network leverages information from encoder-decoder transformers and joint vehicle segmentation.
Navigating Uncertainty: The Role of Short-Term Trajectory Prediction in Autonomous Vehicle Safety
Jul 12, 2023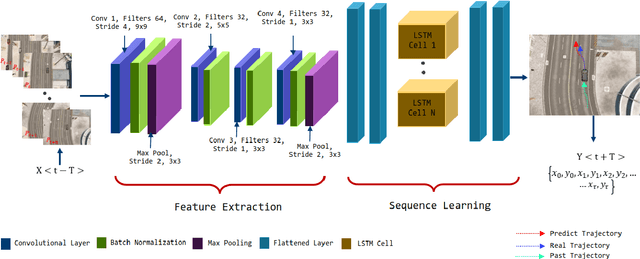
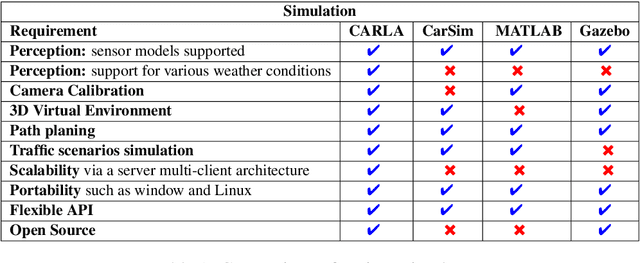
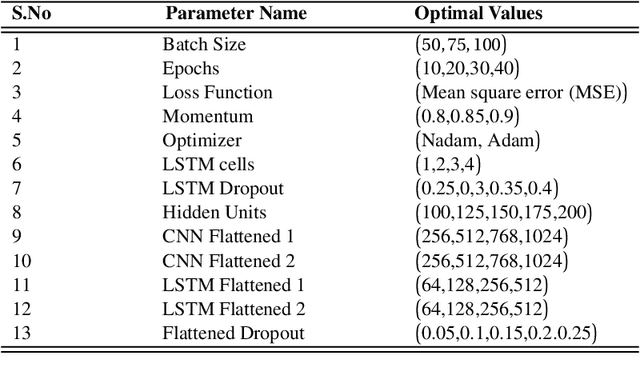
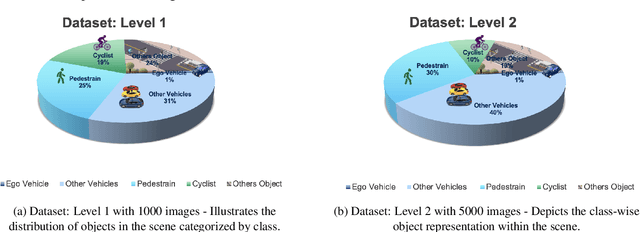
Autonomous vehicles require accurate and reliable short-term trajectory predictions for safe and efficient driving. While most commercial automated vehicles currently use state machine-based algorithms for trajectory forecasting, recent efforts have focused on end-to-end data-driven systems. Often, the design of these models is limited by the availability of datasets, which are typically restricted to generic scenarios. To address this limitation, we have developed a synthetic dataset for short-term trajectory prediction tasks using the CARLA simulator. This dataset is extensive and incorporates what is considered complex scenarios - pedestrians crossing the road, vehicles overtaking - and comprises 6000 perspective view images with corresponding IMU and odometry information for each frame. Furthermore, an end-to-end short-term trajectory prediction model using convolutional neural networks (CNN) and long short-term memory (LSTM) networks has also been developed. This model can handle corner cases, such as slowing down near zebra crossings and stopping when pedestrians cross the road, without the need for explicit encoding of the surrounding environment. In an effort to accelerate this research and assist others, we are releasing our dataset and model to the research community. Our datasets are publicly available on https://github.com/sharmasushil/Navigating-Uncertainty-Trajectory-Prediction .