 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeData-efficient Large Scale Place Recognition with Graded Similarity Supervision
Mar 25, 2023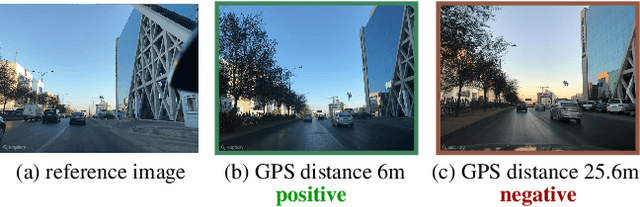
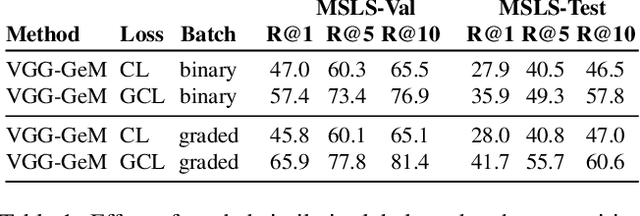
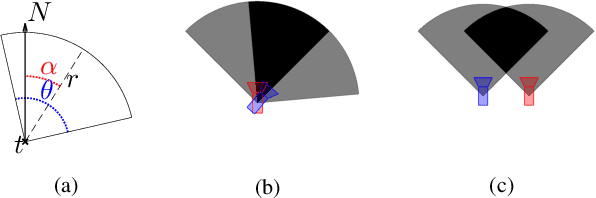
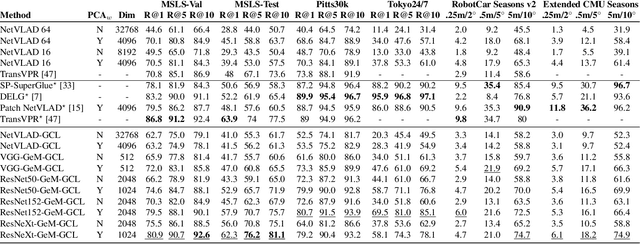
Visual place recognition (VPR) is a fundamental task of computer vision for visual localization. Existing methods are trained using image pairs that either depict the same place or not. Such a binary indication does not consider continuous relations of similarity between images of the same place taken from different positions, determined by the continuous nature of camera pose. The binary similarity induces a noisy supervision signal into the training of VPR methods, which stall in local minima and require expensive hard mining algorithms to guarantee convergence. Motivated by the fact that two images of the same place only partially share visual cues due to camera pose differences, we deploy an automatic re-annotation strategy to re-label VPR datasets. We compute graded similarity labels for image pairs based on available localization metadata. Furthermore, we propose a new Generalized Contrastive Loss (GCL) that uses graded similarity labels for training contrastive networks. We demonstrate that the use of the new labels and GCL allow to dispense from hard-pair mining, and to train image descriptors that perform better in VPR by nearest neighbor search, obtaining superior or comparable results than methods that require expensive hard-pair mining and re-ranking techniques. Code and models available at: https://github.com/marialeyvallina/generalized_contrastive_loss
Place recognition in gardens by learning visual representations: data set and benchmark analysis
Jun 28, 2019
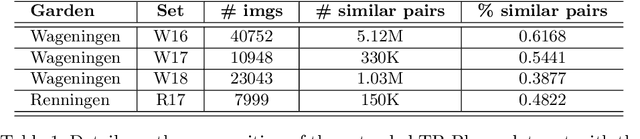
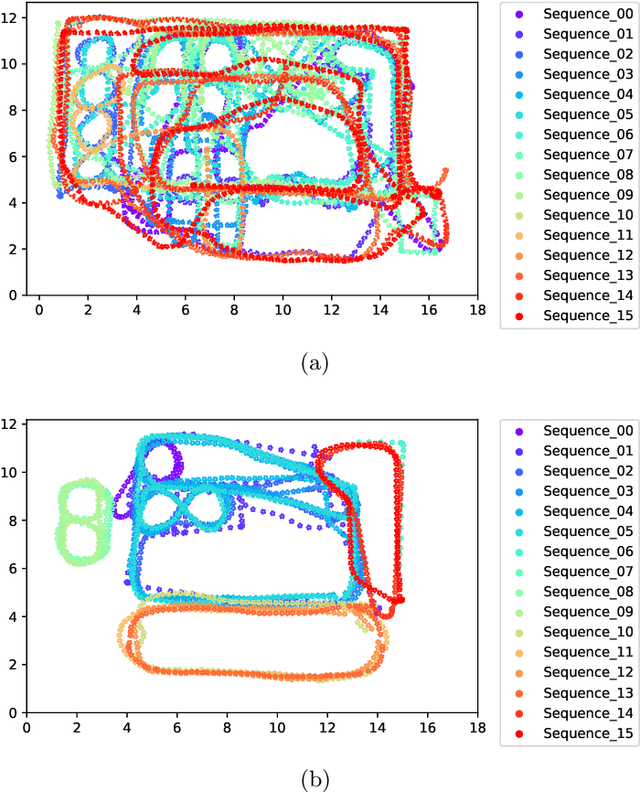

Visual place recognition is an important component of systems for camera localization and loop closure detection. It concerns the recognition of a previously visited place based on visual cues only. Although it is a widely studied problem for indoor and urban environments, the recent use of robots for automation of agricultural and gardening tasks has created new problems, due to the challenging appearance of garden-like environments. Garden scenes predominantly contain green colors, as well as repetitive patterns and textures. The lack of available data recorded in gardens and natural environments makes the improvement of visual localization algorithms difficult. In this paper we propose an extended version of the TB-Places data set, which is designed for testing algorithms for visual place recognition. It contains images with ground truth camera pose recorded in real gardens in different seasons, with varying light conditions. We constructed and released a ground truth for all possible pairs of images, indicating whether they depict the same place or not. We present the results of a benchmark analysis of methods based on convolutional neural networks for holistic image description and place recognition. We train existing networks (i.e. ResNet, DenseNet and VGG NetVLAD) as backbone of a two-way architecture with a contrastive loss function. The results that we obtained demonstrate that learning garden-tailored representations contribute to an improvement of performance, although the generalization capabilities are limited.
Hierarchical approach to classify food scenes in egocentric photo-streams
May 10, 2019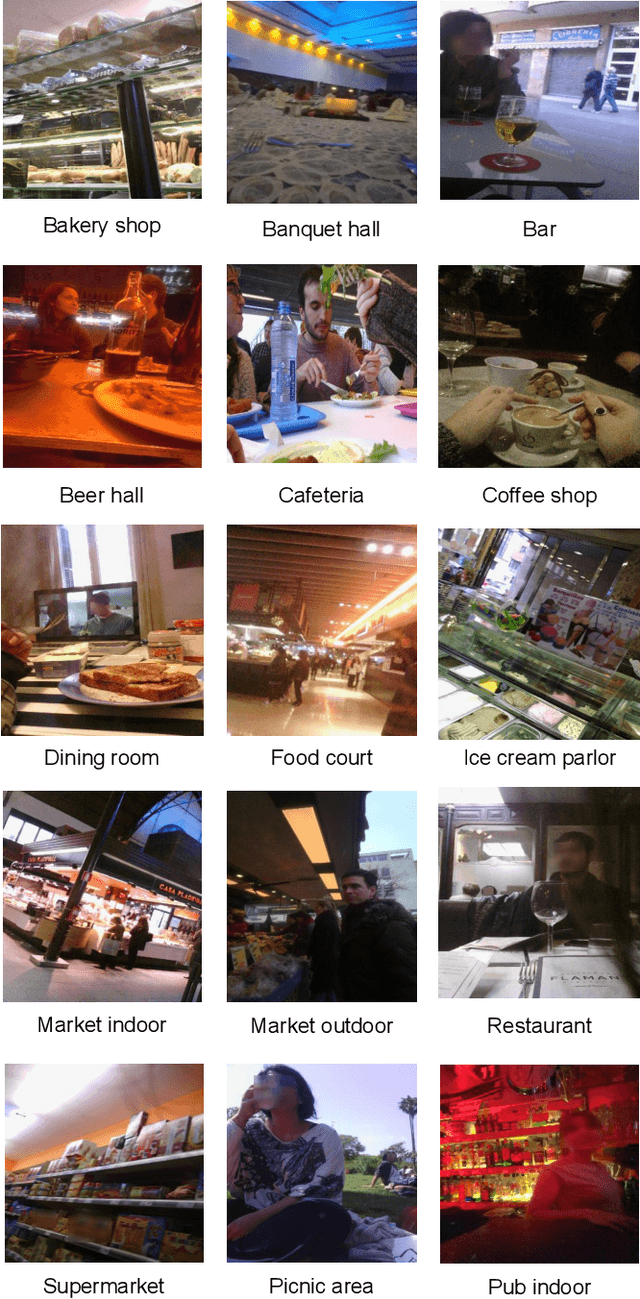
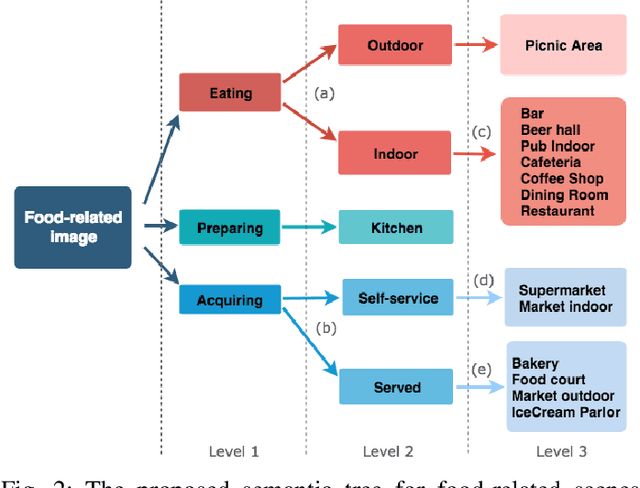
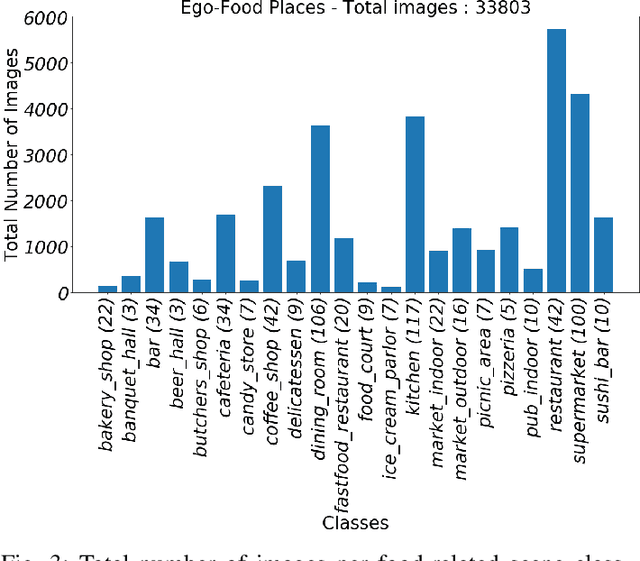
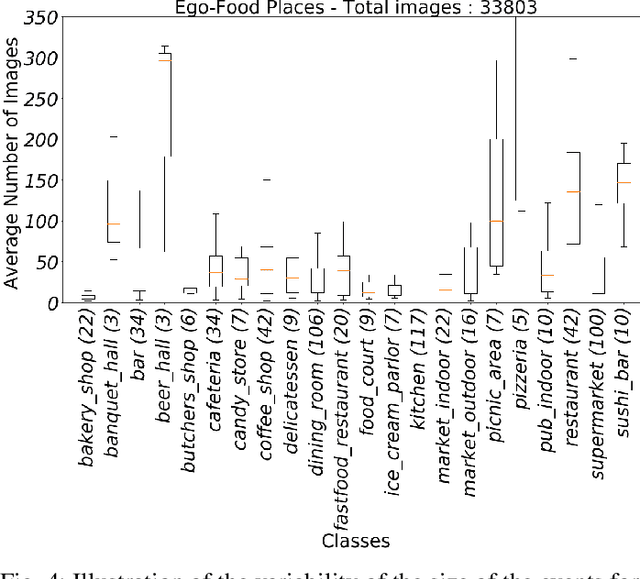
Recent studies have shown that the environment where people eat can affect their nutritional behaviour. In this work, we provide automatic tools for a personalised analysis of a person's health habits by the examination of daily recorded egocentric photo-streams. Specifically, we propose a new automatic approach for the classification of food-related environments, that is able to classify up to 15 such scenes. In this way, people can monitor the context around their food intake in order to get an objective insight into their daily eating routine. We propose a model that classifies food-related scenes organized in a semantic hierarchy. Additionally, we present and make available a new egocentric dataset composed of more than 33000 images recorded by a wearable camera, over which our proposed model has been tested. Our approach obtains an accuracy and F-score of 56\% and 65\%, respectively, clearly outperforming the baseline methods.