 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePlace recognition in gardens by learning visual representations: data set and benchmark analysis
Paper and Code
Jun 28, 2019
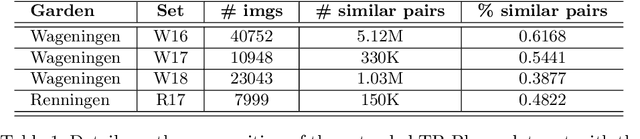
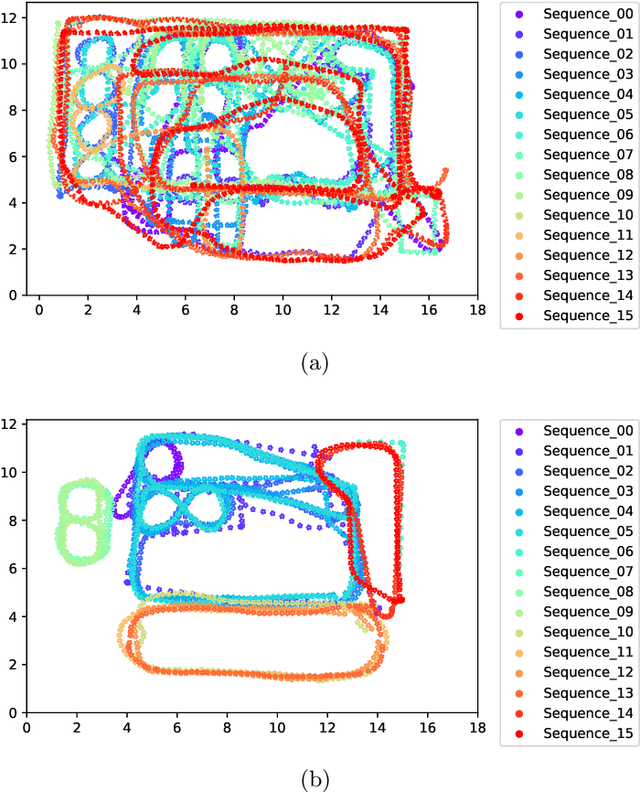

Visual place recognition is an important component of systems for camera localization and loop closure detection. It concerns the recognition of a previously visited place based on visual cues only. Although it is a widely studied problem for indoor and urban environments, the recent use of robots for automation of agricultural and gardening tasks has created new problems, due to the challenging appearance of garden-like environments. Garden scenes predominantly contain green colors, as well as repetitive patterns and textures. The lack of available data recorded in gardens and natural environments makes the improvement of visual localization algorithms difficult. In this paper we propose an extended version of the TB-Places data set, which is designed for testing algorithms for visual place recognition. It contains images with ground truth camera pose recorded in real gardens in different seasons, with varying light conditions. We constructed and released a ground truth for all possible pairs of images, indicating whether they depict the same place or not. We present the results of a benchmark analysis of methods based on convolutional neural networks for holistic image description and place recognition. We train existing networks (i.e. ResNet, DenseNet and VGG NetVLAD) as backbone of a two-way architecture with a contrastive loss function. The results that we obtained demonstrate that learning garden-tailored representations contribute to an improvement of performance, although the generalization capabilities are limited.