 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDisentangled Clothed Avatar Generation with Layered Representation
Jan 08, 2025



Clothed avatar generation has wide applications in virtual and augmented reality, filmmaking, and more. Previous methods have achieved success in generating diverse digital avatars, however, generating avatars with disentangled components (\eg, body, hair, and clothes) has long been a challenge. In this paper, we propose LayerAvatar, the first feed-forward diffusion-based method for generating component-disentangled clothed avatars. To achieve this, we first propose a layered UV feature plane representation, where components are distributed in different layers of the Gaussian-based UV feature plane with corresponding semantic labels. This representation supports high-resolution and real-time rendering, as well as expressive animation including controllable gestures and facial expressions. Based on the well-designed representation, we train a single-stage diffusion model and introduce constrain terms to address the severe occlusion problem of the innermost human body layer. Extensive experiments demonstrate the impressive performances of our method in generating disentangled clothed avatars, and we further explore its applications in component transfer. The project page is available at: https://olivia23333.github.io/LayerAvatar/
Flexible Error Mitigation of Quantum Processes with Data Augmentation Empowered Neural Model
Nov 03, 2023Neural networks have shown their effectiveness in various tasks in the realm of quantum computing. However, their application in quantum error mitigation, a crucial step towards realizing practical quantum advancements, has been restricted by reliance on noise-free statistics. To tackle this critical challenge, we propose a data augmentation empowered neural model for error mitigation (DAEM). Our model does not require any prior knowledge about the specific noise type and measurement settings and can estimate noise-free statistics solely from the noisy measurement results of the target quantum process, rendering it highly suitable for practical implementation. In numerical experiments, we show the model's superior performance in mitigating various types of noise, including Markovian noise and Non-Markovian noise, compared with previous error mitigation methods. We further demonstrate its versatility by employing the model to mitigate errors in diverse types of quantum processes, including those involving large-scale quantum systems and continuous-variable quantum states. This powerful data augmentation-empowered neural model for error mitigation establishes a solid foundation for realizing more reliable and robust quantum technologies in practical applications.
YOLOP: You Only Look Once for Panoptic Driving Perception
Aug 31, 2021
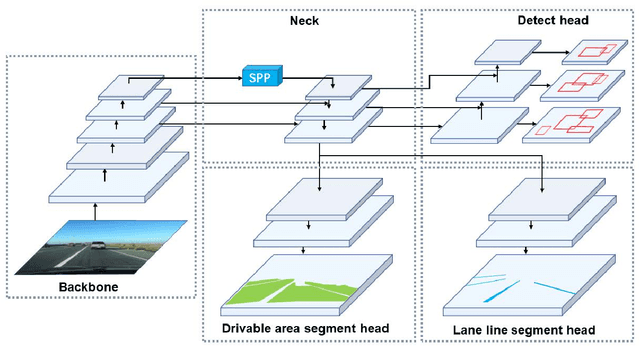
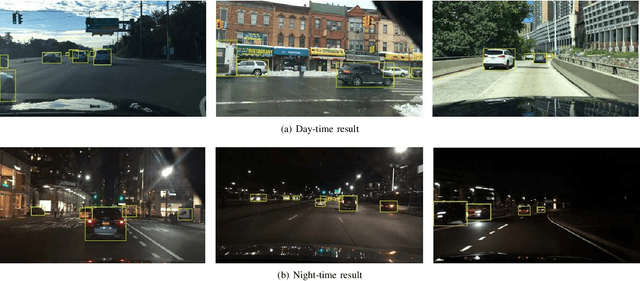
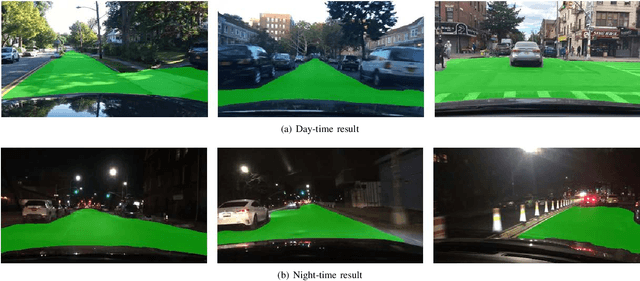
A panoptic driving perception system is an essential part of autonomous driving. A high-precision and real-time perception system can assist the vehicle in making the reasonable decision while driving. We present a panoptic driving perception network (YOLOP) to perform traffic object detection, drivable area segmentation and lane detection simultaneously. It is composed of one encoder for feature extraction and three decoders to handle the specific tasks. Our model performs extremely well on the challenging BDD100K dataset, achieving state-of-the-art on all three tasks in terms of accuracy and speed. Besides, we verify the effectiveness of our multi-task learning model for joint training via ablative studies. To our best knowledge, this is the first work that can process these three visual perception tasks simultaneously in real-time on an embedded device Jetson TX2(23 FPS) and maintain excellent accuracy. To facilitate further research, the source codes and pre-trained models will be released at https://github.com/hustvl/YOLOP.