 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRT-X Net: RGB-Thermal cross attention network for Low-Light Image Enhancement
May 30, 2025In nighttime conditions, high noise levels and bright illumination sources degrade image quality, making low-light image enhancement challenging. Thermal images provide complementary information, offering richer textures and structural details. We propose RT-X Net, a cross-attention network that fuses RGB and thermal images for nighttime image enhancement. We leverage self-attention networks for feature extraction and a cross-attention mechanism for fusion to effectively integrate information from both modalities. To support research in this domain, we introduce the Visible-Thermal Image Enhancement Evaluation (V-TIEE) dataset, comprising 50 co-located visible and thermal images captured under diverse nighttime conditions. Extensive evaluations on the publicly available LLVIP dataset and our V-TIEE dataset demonstrate that RT-X Net outperforms state-of-the-art methods in low-light image enhancement. The code and the V-TIEE can be found here https://github.com/jhakrraman/rt-xnet.
Dataset and Benchmark: Novel Sensors for Autonomous Vehicle Perception
Jan 24, 2024Conventional cameras employed in autonomous vehicle (AV) systems support many perception tasks, but are challenged by low-light or high dynamic range scenes, adverse weather, and fast motion. Novel sensors, such as event and thermal cameras, offer capabilities with the potential to address these scenarios, but they remain to be fully exploited. This paper introduces the Novel Sensors for Autonomous Vehicle Perception (NSAVP) dataset to facilitate future research on this topic. The dataset was captured with a platform including stereo event, thermal, monochrome, and RGB cameras as well as a high precision navigation system providing ground truth poses. The data was collected by repeatedly driving two ~8 km routes and includes varied lighting conditions and opposing viewpoint perspectives. We provide benchmarking experiments on the task of place recognition to demonstrate challenges and opportunities for novel sensors to enhance critical AV perception tasks. To our knowledge, the NSAVP dataset is the first to include stereo thermal cameras together with stereo event and monochrome cameras. The dataset and supporting software suite is available at: https://umautobots.github.io/nsavp
LONER: LiDAR Only Neural Representations for Real-Time SLAM
Sep 12, 2023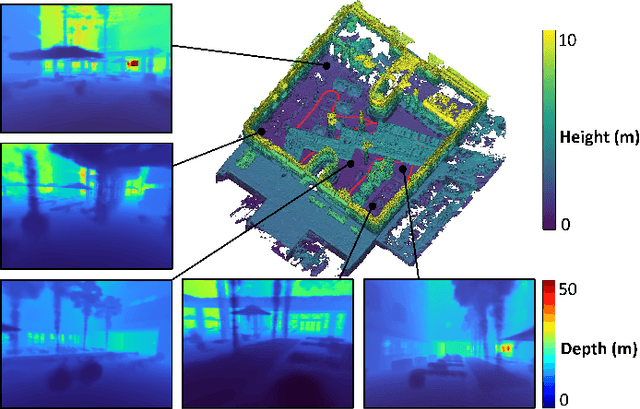
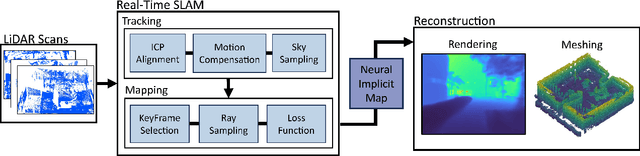
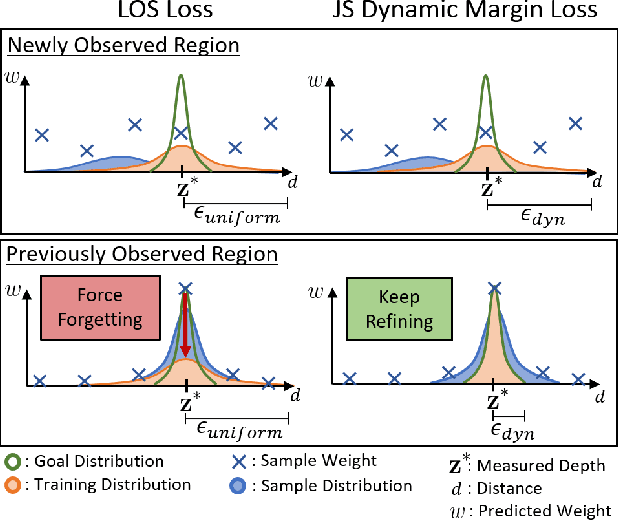
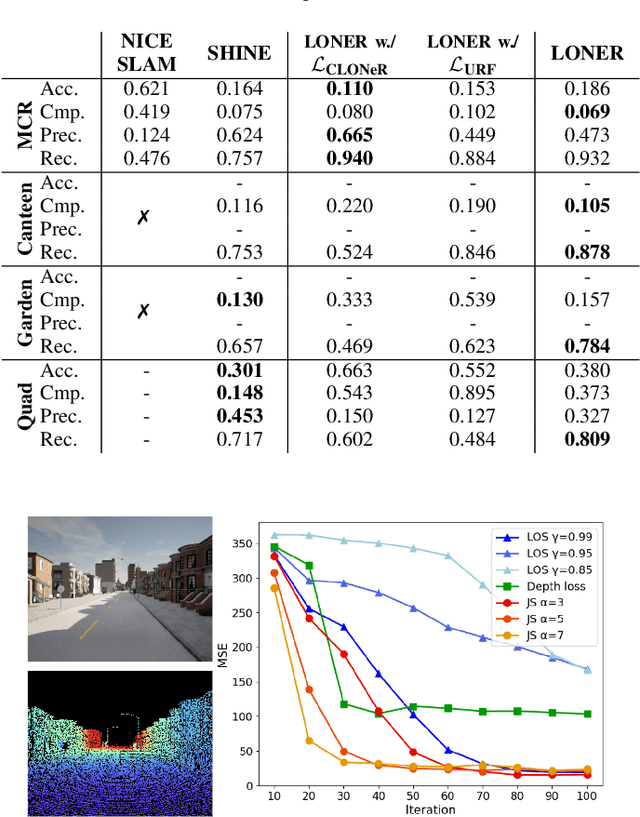
This paper proposes LONER, the first real-time LiDAR SLAM algorithm that uses a neural implicit scene representation. Existing implicit mapping methods for LiDAR show promising results in large-scale reconstruction, but either require groundtruth poses or run slower than real-time. In contrast, LONER uses LiDAR data to train an MLP to estimate a dense map in real-time, while simultaneously estimating the trajectory of the sensor. To achieve real-time performance, this paper proposes a novel information-theoretic loss function that accounts for the fact that different regions of the map may be learned to varying degrees throughout online training. The proposed method is evaluated qualitatively and quantitatively on two open-source datasets. This evaluation illustrates that the proposed loss function converges faster and leads to more accurate geometry reconstruction than other loss functions used in depth-supervised neural implicit frameworks. Finally, this paper shows that LONER estimates trajectories competitively with state-of-the-art LiDAR SLAM methods, while also producing dense maps competitive with existing real-time implicit mapping methods that use groundtruth poses.